モーターネジ締めロボットにおけるサボタージュにより、ヘッドのトランスデューサーに電子オフセットを施すことで締付トルクを改ざんする、稀な技術的脆弱性が明らかになりました。組立ラインに影響を与えたこのインシデントは、GOM InspectやBlenderなどの3Dツールを用いて障害のシーケンスを再構築し、操作の発生源を特定するために分析されました。
ネジ締めヘッドにおけるサボタージュの3D法医学的再構築 🔧
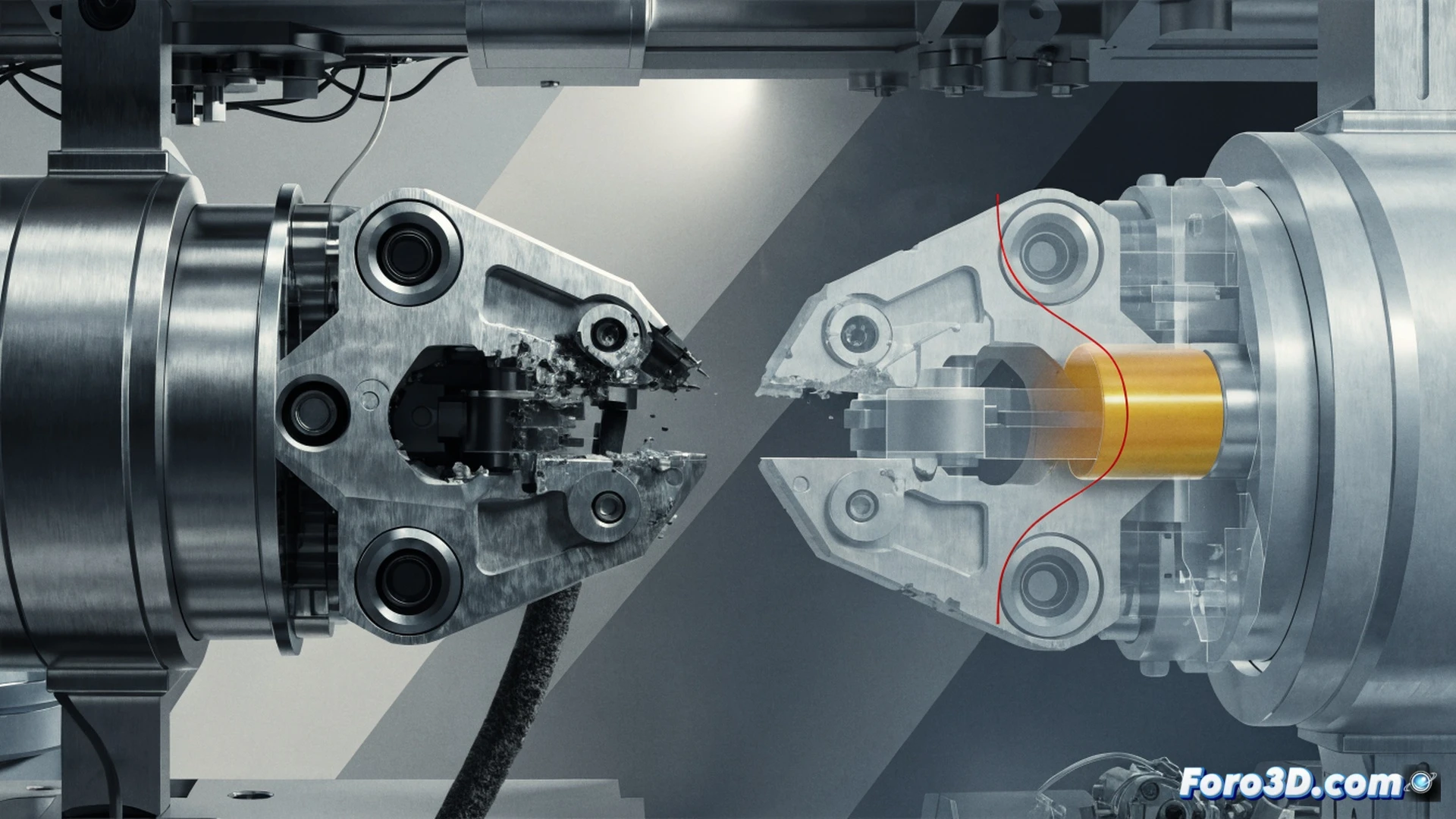
GOM Inspectを用いた分析により、ヘッドをスキャンしてトランスデューサーの形状にずれを検出し、Blenderはロボットの軌道とオフセットが発生した正確な瞬間をシミュレートするために使用されました。偽造された電子信号が実際にかかるトルクを変更し、締め付け不足または過剰な締め付けを引き起こしていることが特定されました。目視検査では検出が難しいこの方法は、異常を確認するためにトルク履歴と3Dメッシュ間のデータ照合を必要としました。
反抗的なネジ締め機:ロボットが自分のやり方で締め付けることを決めた時 🤖
このケースで最も興味深い点は、ロボットがプロの妨害工作員とは程遠く、単に命令に従っていただけだということです。誰かがロボットに「ここは緩く締めて、あそこは強く締めろ」と指示し、哀れな機械は独自の判断力を持たず、その通りに実行しました。現在、技術者たちはあたかもスパイであるかのようにすべてのトランスデューサーを検査しており、ロボットは尋問室で自分の順番を待っていますが、その唯一の自白はエラービープ音だけでしょう。