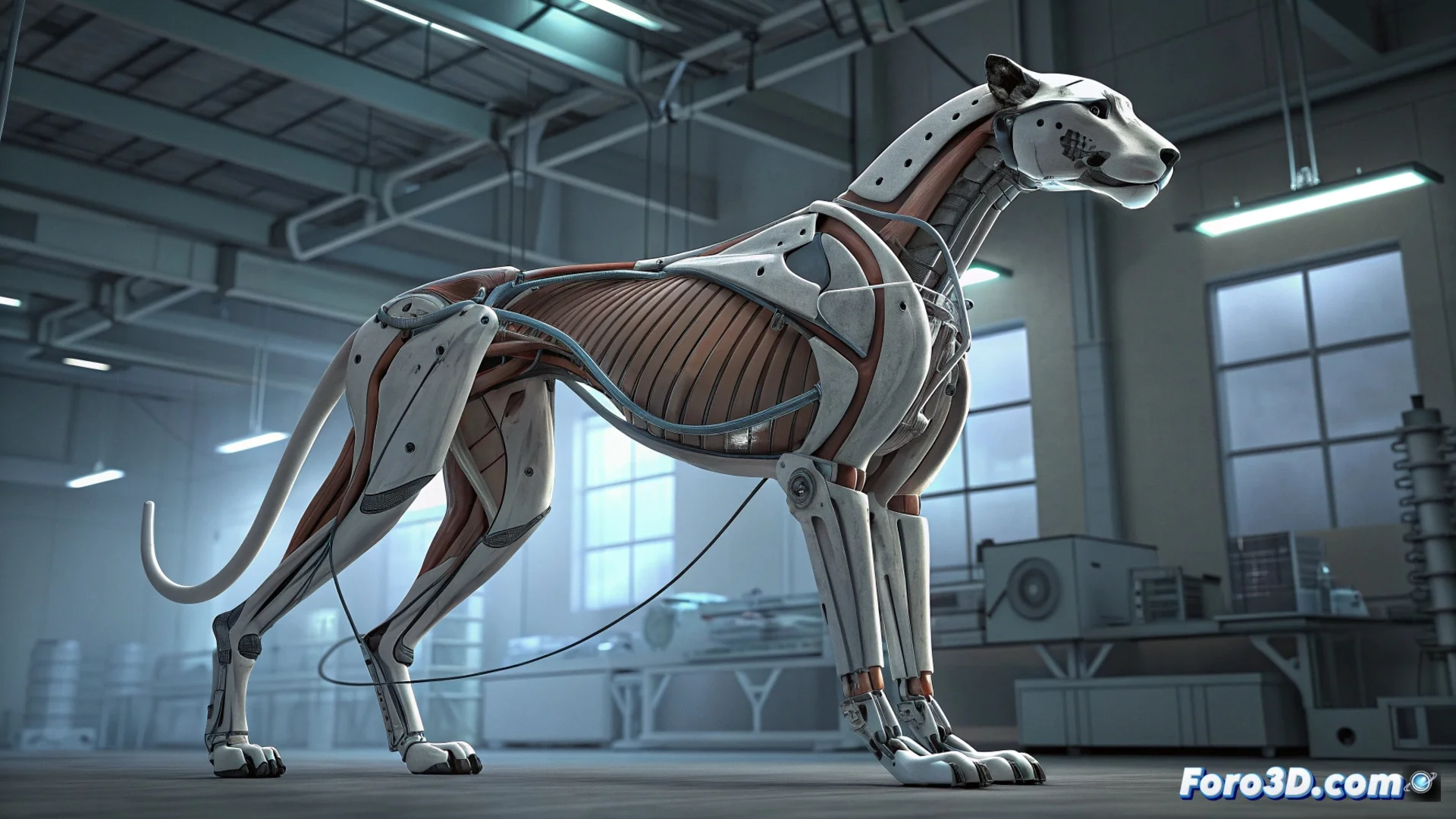
Pneupard:チーターを模倣した空気圧駆動四足ロボット
大阪大学で、科学者チームが開発中の四足ロボット「Pneupard」は、推進システムが圧縮空気のみに依存しています。このプロジェクトは、陸上最速の動物であるチーターの筋肉のメカニクスを再現することを目指しています。電動モーターを空気圧アクチュエータに置き換えることで、ロボットは自然な柔軟性を得て、ダイナミックに動き、地形に適応できます。🐆
空気圧がその機動性と柔軟性を定義する
空気圧システムはPneupardの能力の中核です。圧縮空気で駆動されるアクチュエータは拡張と収縮を繰り返し、実際の筋肉収縮をシミュレートします。これにより、潜在的に高速で滑らかで固有の弾力性を持つ運動が生まれます。これらのコンポーネントのcompliance(順応性)は、ロボットが環境とより安全に相互作用することを可能にし、衝撃を吸収し、移動時の力を調整できます。このアプローチは、不規則または変化する地形で動作するロボットの設計に有望な代替手段です。
空気圧システムの主な利点:- 生物学的組織を模倣した固有の柔軟性を提供します。
- 高速運動と自然な衝撃吸収を可能にします。
- 予測不能な環境とのより安全な相互作用を容易にします。
自然な動きの優雅さは、形状の模倣だけでは不十分で、筋肉の物理を再現する必要があります。
動物の動きを理解するための物理的実験室
Pneupardの主な目的は商業的ではなく、先進的な研究ツールとして機能することです。研究者たちはこれを物理的な実体モデルとして用い、動物がどのように四肢を協調させ平衡を保つかを検証します。歩行パターンのデータを分析することで、自然界の運動におけるエネルギー効率、安定性、リズムをより深く理解できます。
この研究の潜在的応用:- 救助や探査のための歩行ロボット設計の改善。
- より自然で適応的なロボット義肢の開発に着想を与える。
- 生物学的運動に基づく新しい物理リハビリテーションシステムの作成。
模倣から同等化への道のり
そのインスピレーションは高速チーターですが、現在のPneupardの速度はレースではなく穏やかな散歩に近いです。この詳細は根本的な原則を強調します:模倣する生物学的システムの洗練さと効率は複雑な工学課題です。Pneupardは最終目的地ではなく、生物学とロボット工学の橋渡しをする重要なステップで、時には最も洗練された解決策が単なる圧縮空気で駆動されることを示しています。🤖