3Dプリンターのホーミング障害の診断と解決
ホーミングは、3Dプリンターが各軸のゼロ位置を決定する重要なルーチンです。このプロセスが失敗すると、マシンは基準点を確立できず、ロックしてしまい、任意の作業を開始できないエラーが表示されます。通常、これらの障害は機械的コンポーネントや電気システムの問題に起因します。🔧
軸の機械システムの確認
ホーミングの問題を解決するための最初のステップは、機械部分を徹底的に検査することです。すべての軸がスムーズに移動することを確認し、何も妨げていないことを確かめてください。リニアガイドやベアリングの埃や汚れの蓄積は、ロックの一般的な原因です。
機械で確認する主要なポイント:- ベルトのテンション:ベルトが正しく調整されていることを確認してください。ベルトが緩すぎるとプーリーが滑り、運動が伝わらなくなります。
- モーターの状態:ステッピングモーターが回転せず、軸を動かさずに大きなブーンという音を出す場合、電気的な接続不良やモーター自体の故障を示唆します。
- 異常な騒音:軸を手動で動かしたときにキーキー音、ガリガリ音、または金属音などの音に注意してください。これらは摩擦や障害物の明確な兆候です。
スムーズに動かない軸は、ホーミングが完了しない場合の最初の容疑者です。
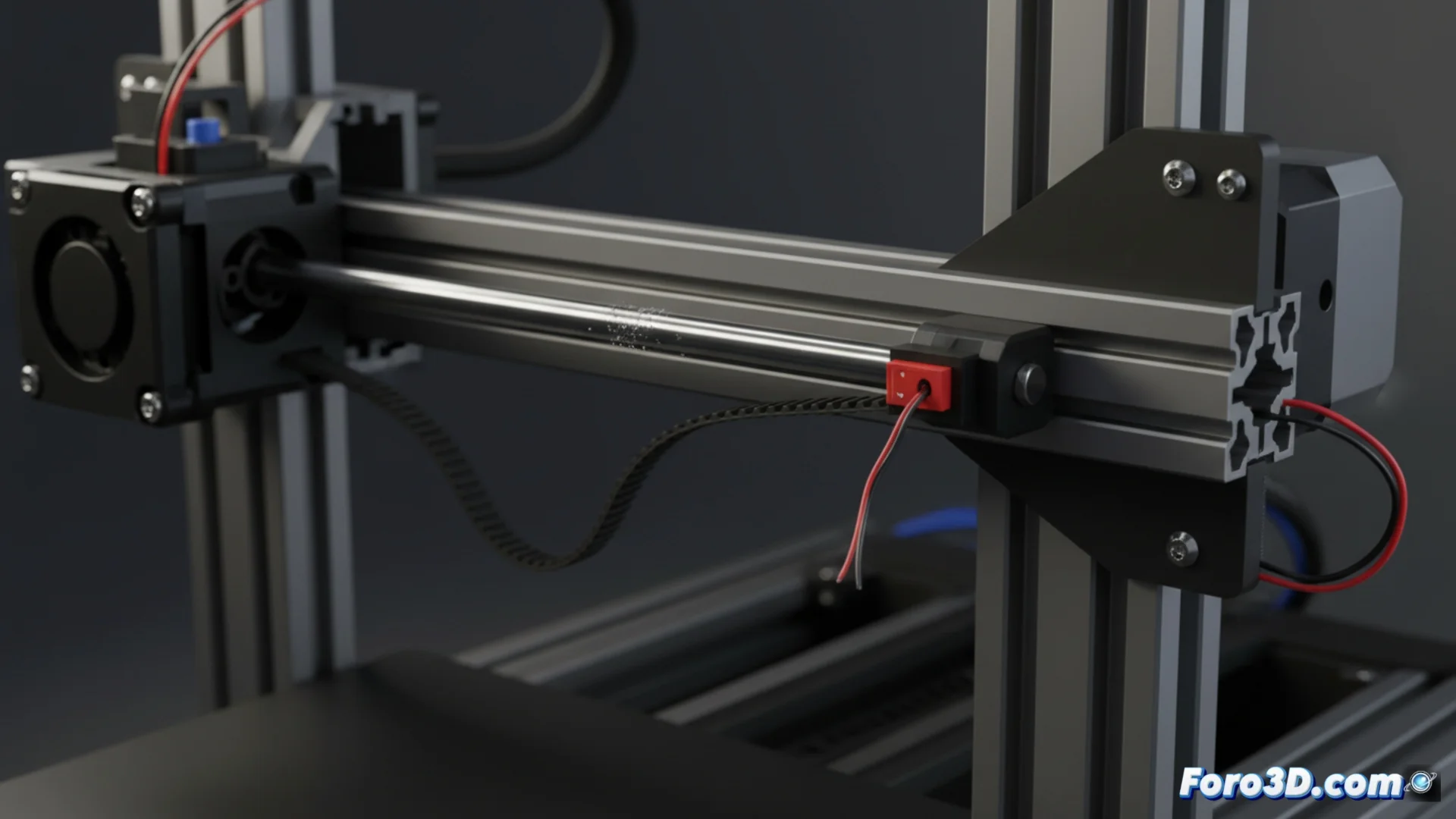
リミットスイッチの検査
機械が正常に見える場合、次の焦点は終端スイッチです。これらのデバイス(機械式、光学式、または磁気式)は、制御板にヘッドやベッドが極限位置に到達したことを知らせます。欠陥のある、誤接続された、または汚れたセンサーは、ホーミングルーチンを体系的に失敗させます。
センサーをチェックする手順:- 接続と配線:制御板にコネクタが正しく挿入されているかを視覚的に確認してください。緩んだ、曲がった、または切れたケーブルは最も一般的な故障です。
- マルチメーターでのテスト:継続モードのマルチメーターを使用してセンサーをテストしてください。センサを手動で作動させたときに状態(オープン/クローズ)の変化が見えるはずです。
- ファームウェアの設定:ファームウェア(Marlin、Klipperなど)の設定にアクセスし、インストールされたハードウェアに合わせてセンサーのタイプ(Normally Open -NO- または Normally Closed -NC-)が定義されているかを確認してください。
逆の問題:偽の作動
場合によっては、プリンターが終端スイッチを見つけられないのではなく、常に押されているかのように動作します。これにより、マシンは原点にすでにいると信じて移動を拒否します。原因は通常、センサーを恒久的に作動させたままにする物理的なもの、例えば小さなプラスチック片、誤って配置されたケーブルがレバーを押す、または接着剤の滴です。センサー周辺のエリアを掃除し、その位置を確認することで、この問題は通常解決します。🛠️