Il mese scorso, un incrocio intelligente dotato di sensori LiDAR per infrastruttura V2X è stato teatro di un incidente tra due veicoli autonomi. Le autorità, sconcertate dall'apparente guasto del sistema di controllo, hanno fatto ricorso a una pipeline forense 3D per chiarire i fatti. L'ipotesi principale puntava a un errore di calibrazione indotto dalla dilatazione termica del palo di montaggio, un guasto difficile da rilevare in tempo reale ma critico per la sicurezza di questi ambienti.
Flusso di lavoro tecnico: Dalla nuvola di punti alla simulazione in UE5 🛠️
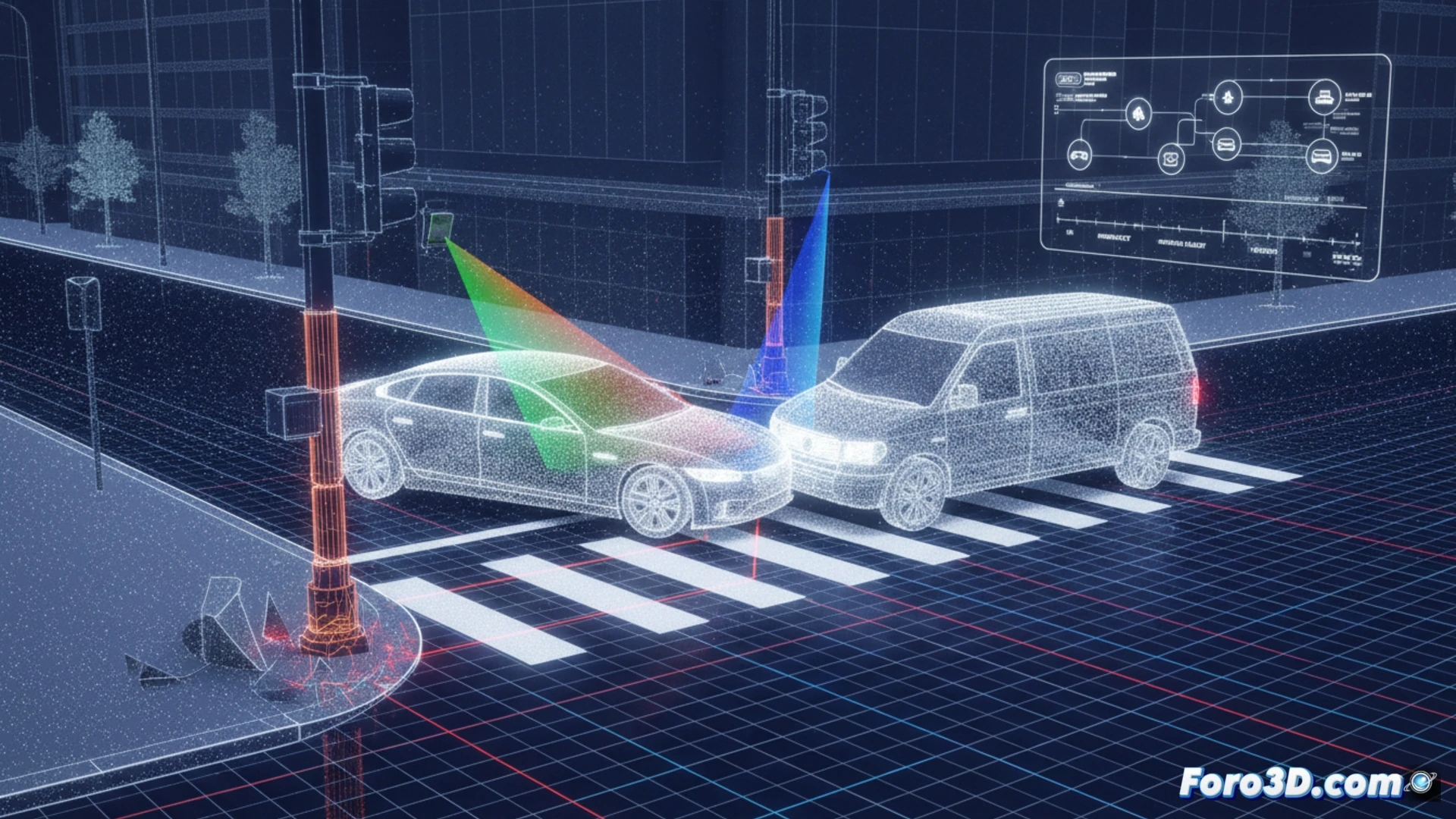
Il processo è iniziato con l'estrazione delle nuvole di punti grezze registrate dal LiDAR dell'incrocio durante i secondi precedenti l'impatto. Il primo passo critico è stata l'importazione di questi dati in CloudCompare, dove è stato eseguito un allineamento fine (registrazione ICP) delle nuvole di punti statiche (pali, cordoli) rispetto al modello CAD dell'opera civile. Questo confronto ha rivelato uno spostamento progressivo della nuvola di 4,2 centimetri sull'asse Z, coincidente con il picco di temperatura ambiente. Dopo aver confermato l'errore di calibrazione, la traiettoria corretta dei veicoli è stata esportata in MATLAB per il calcolo della cinematica dell'impatto. Infine, i dati puliti e le mesh dei veicoli sono stati integrati in Unreal Engine 5, dove la scena è stata ricreata con illuminazione HDR e fisiche realistiche per visualizzare il punto esatto della collisione e la manovra evasiva fallita.
Lezioni per la validazione dell'infrastruttura LiDAR 📐
Questo caso sottolinea la necessità di implementare procedure di calibrazione dinamiche nei sensori V2X. La dilatazione del palo, un fenomeno fisico prevedibile, può deviare la percezione di un veicolo autonomo senza che i sistemi di bordo lo rilevino. La combinazione di strumenti come CloudCompare per l'analisi geometrica e Unreal Engine 5 per la simulazione visiva si consolida come lo standard de facto nelle indagini sugli incidenti della mobilità connessa. Non si tratta solo di ricostruire un incidente, ma di capire come l'ambiente fisico e l'infrastruttura digitale interagiscono per fallire o salvare vite.
È possibile rilevare un errore di calibrazione LiDAR in un incrocio V2X analizzando i pattern di riflettanza di oggetti statici prima che si verifichi un incidente come quello descritto?
(NDR: Nell'analisi delle scene, ogni testimone di scala è un piccolo eroe anonimo.)