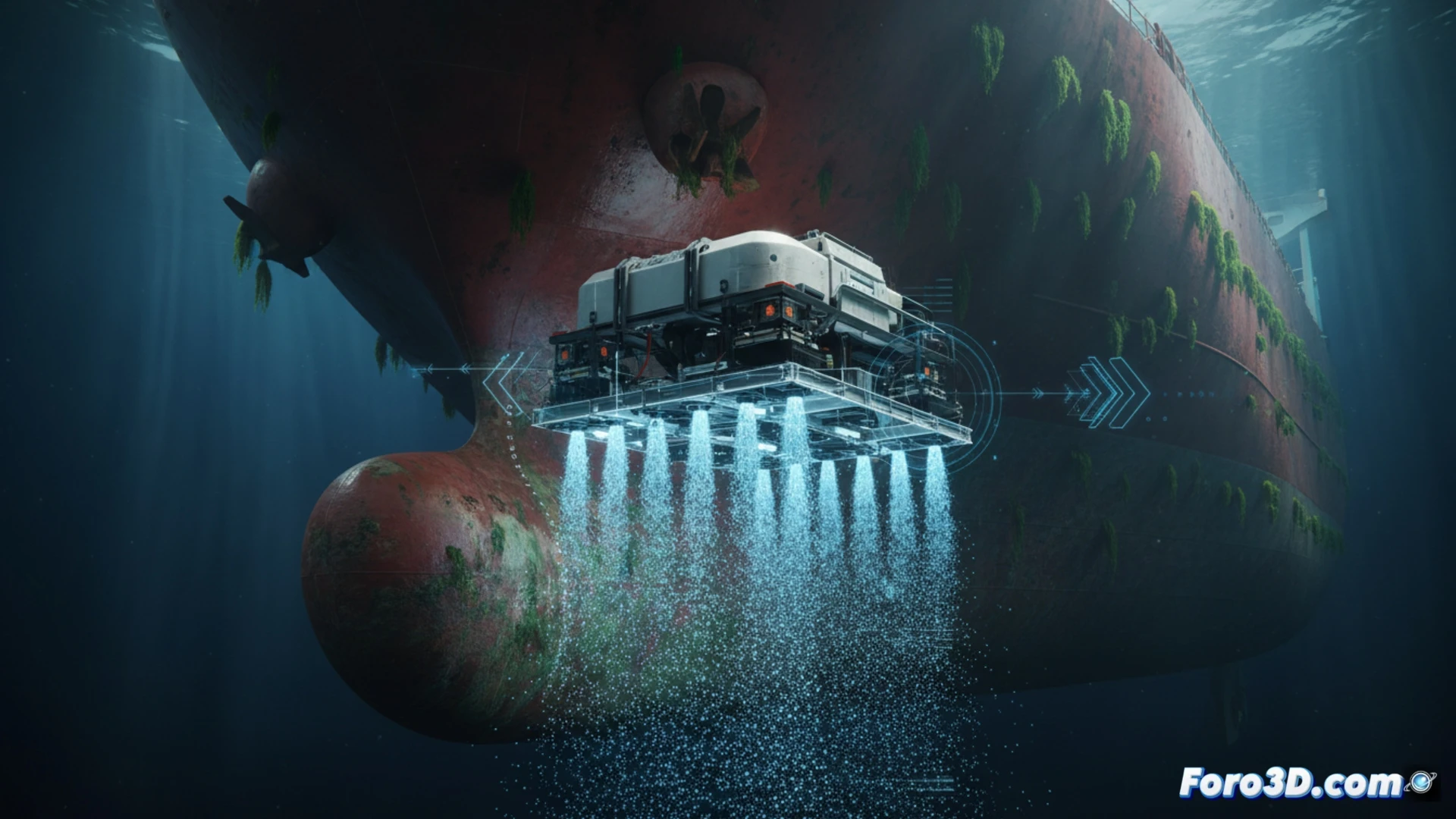
L'HullWiper è un veicolo sottomarino operato a distanza (ROV) progettato per pulire gli scafi delle navi tramite getti d'acqua ad alta pressione, senza danneggiare la vernice anticorrosiva. La sua modellazione 3D richiede di catturare la geometria dello scafo, gli ugelli dei getti e la dinamica del fluido. Questo articolo analizza il flusso di lavoro tecnico per simulare il suo funzionamento in ambienti virtuali, ottimizzando l'efficienza del carburante e la durata del rivestimento navale.
Flusso di lavoro tecnico: Scansione, mesh e simulazione di traiettorie 🤖
Il processo inizia con la scansione laser dello scafo della nave per generare una nuvola di punti. Questa viene convertita in una mesh poligonale ad alta risoluzione in software CAD (come Blender o Rhino). Successivamente si integra il modello del ROV HullWiper, progettato con servomotori e ugelli orientabili. Per simulare i getti d'acqua, si utilizzano particelle dinamiche o fluidi basati sul metodo SPH (Smoothed Particle Hydrodynamics). Il passo successivo è definire le traiettorie di pulizia tramite algoritmi di scansione, evitando angoli che potrebbero erodere la vernice. La simulazione finale valida la pressione e il tempo di esposizione, regolando i parametri per non superare i limiti di aderenza del rivestimento.
Ottimizzazione virtuale: Efficienza e prevenzione dei danni alla vernice 🚢
La simulazione 3D consente di testare centinaia di configurazioni senza rischi reali. Visualizzando la distribuzione della pressione sullo scafo, si identificano le zone critiche dove il getto potrebbe sollevare la vernice. Regolando la distanza e l'angolo degli ugelli nel modello, si ottiene una pulizia uniforme con un 20% in meno di tempo di operazione. Questo approccio riduce il consumo di carburante della nave fino al 10% e prolunga la vita del rivestimento, dimostrando che la robotica sottomarina e la modellazione 3D sono alleati indispensabili nell'automazione navale moderna.
Quali parametri di simulazione CFD devono essere considerati nella modellazione 3D dei getti d'acqua del ROV HullWiper per ottimizzare l'efficienza di pulizia senza danneggiare lo scafo della nave?
(PS: Simulare robot è divertente, finché non decidono di non seguire i tuoi ordini.)