La frattura di un ago microchirurgico durante un'operazione robotica solleva un dilemma tecnico critico: il materiale ha ceduto per fatica o è stata la pressione eccessiva del robot? Il frammento recuperato viene sottoposto ad un'analisi forense mediante microscopia elettronica 3D (ZEISS ZEN) e micro-simulazione agli elementi finiti (Abaqus). Questo articolo analizza il flusso di lavoro per determinare la causa principale del collasso strutturale.
Flusso di lavoro forense: Dalla micrografia 3D alla simulazione di fatica 🔬
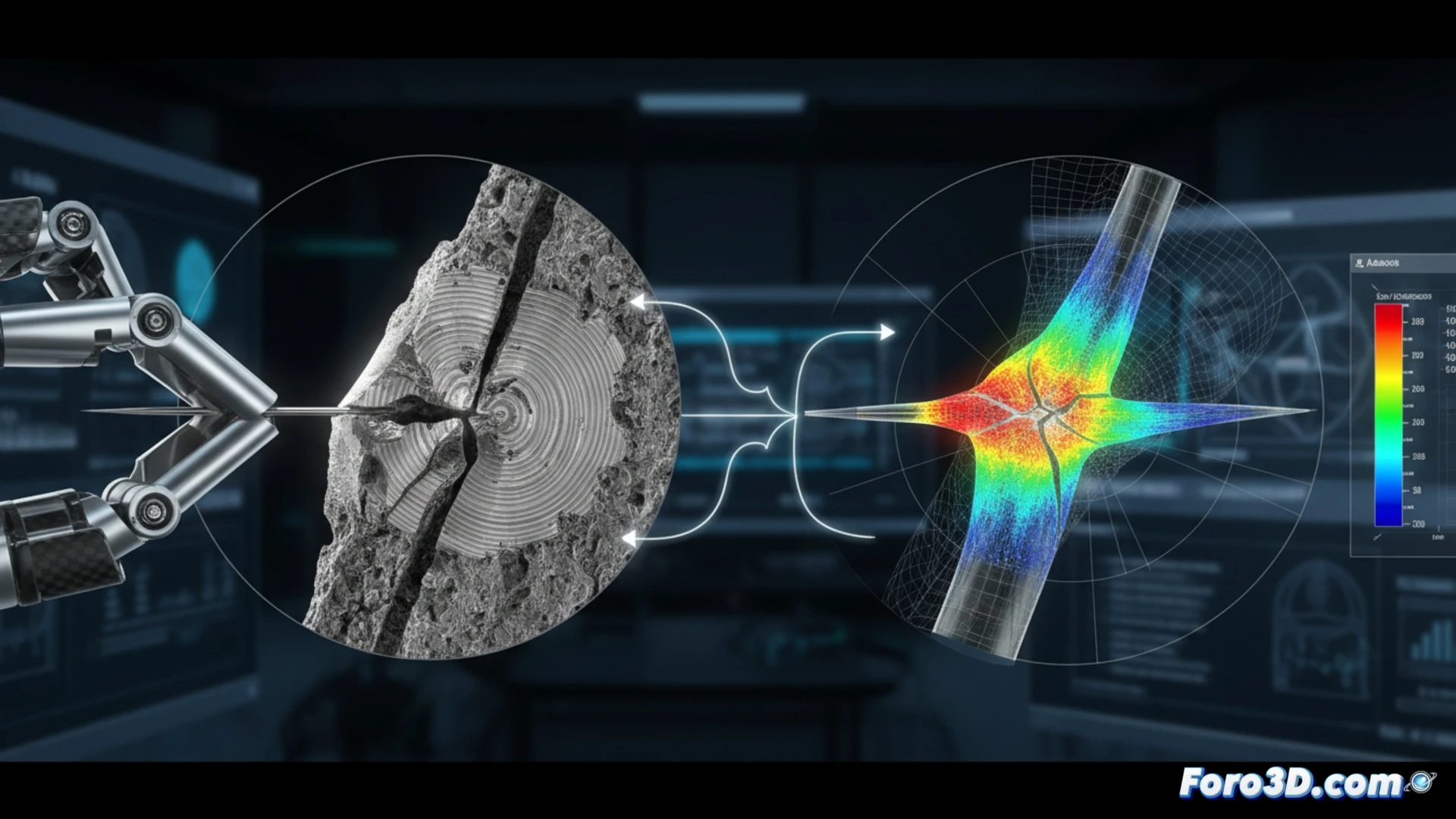
Il processo inizia con l'acquisizione della topografia superficiale del frammento in ZEISS ZEN, generando un modello 3D ad alta risoluzione che rivela segni di propagazione della cricca e striature da fatica. Questo modello viene esportato in Materialise Mimics per segmentare la geometria reale e correggere gli artefatti. Successivamente, viene importato in Abaqus per una micro-FEA che simula i carichi ciclici tipici della sutura robotica. L'analisi confronta due scenari: fatica accumulata da cicli ripetitivi versus un sovraccarico puntuale che supera il limite elastico dell'acciaio inossidabile 316L. La distribuzione delle tensioni di Von Mises sulla punta dell'ago determina se il cedimento coincide con la zona di contatto contro il tessuto osseo.
Il dilemma del feedback aptico: pressione controllata o errore software? 🤖
La simulazione rivela che un sovraccarico puntuale genera un pattern di frattura fragile con bordi netti, mentre la fatica produce striature progressive e deformazione plastica localizzata. Se il modello in Abaqus conferma che la tensione massima ha superato la soglia del materiale solo in condizioni di pressione sostenuta, la causa punta a un cedimento nel software di haptic feedback. Questa analisi non solo scagiona il materiale, ma obbliga a ricalibrare gli algoritmi di resistenza del robot per evitare futuri incidenti.
In una simulazione FEA forense di un ago chirurgico fratturato durante un'operazione robotica, come si può discriminare tra un cedimento per fatica ciclica dovuta a micro-vibrazioni non rilevate e un cedimento per sovraccarico puntuale generato dalla rigidità dell'attuatore robotico?
(PS: La fatica dei materiali è come la tua dopo 10 ore di simulazione.)