Il recente guasto di un robot chirurgico durante un'operazione remota ha fatto scattare l'allarme nel settore dell'automazione. L'incidente, in cui il bisturi ha eseguito un movimento erratico fatale, ha avuto origine nel braccio robotico. Un'analisi forense con metrologia ottica ha rivelato che la causa non è stato un errore software, bensì un micro-usura asimmetrica nei servomotori e negli ingranaggi, indotta da una latenza nel segnale di controllo.
Metrologia di precisione: scansione e analisi della fatica 🔬
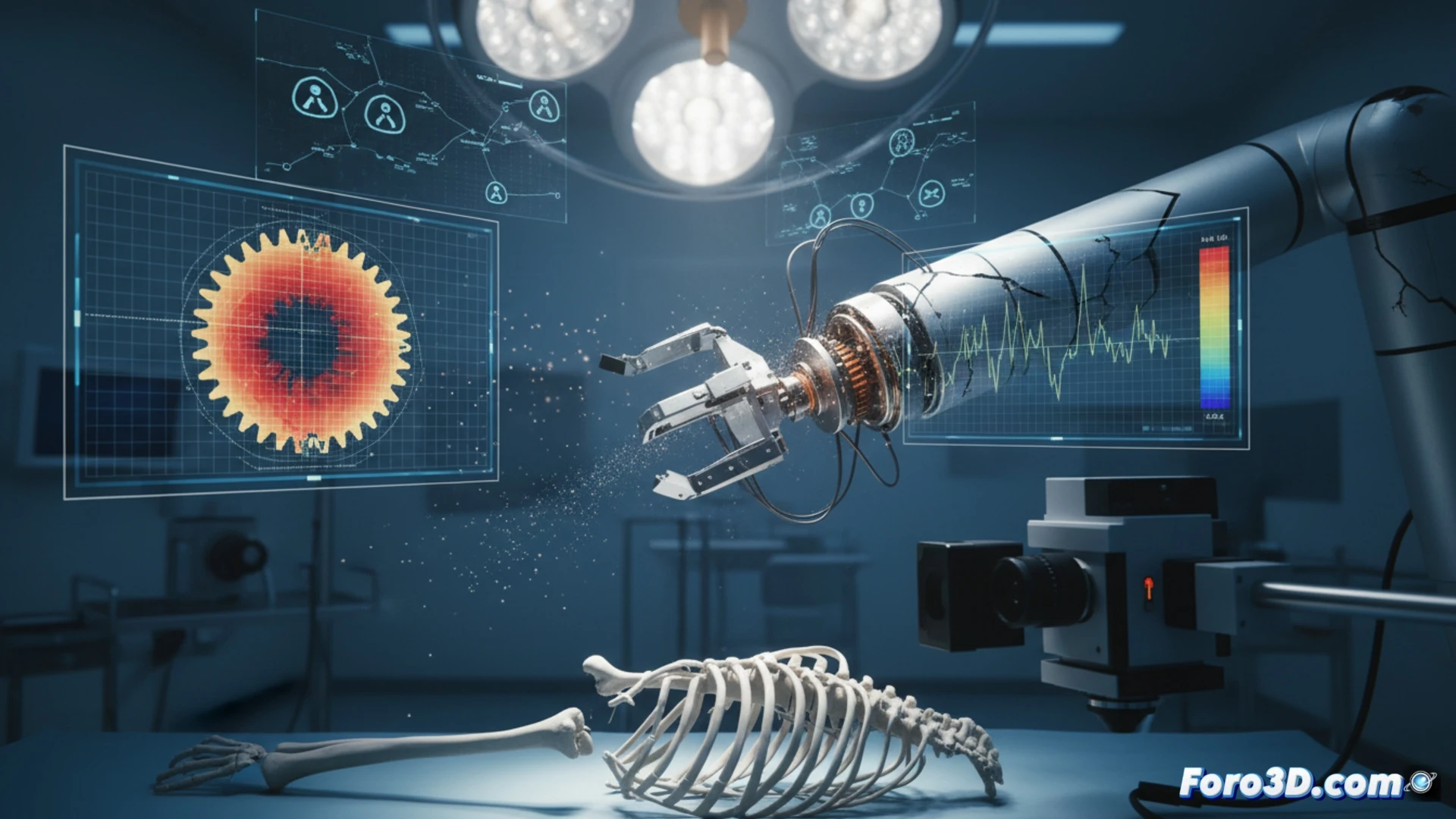
Per determinare la causa principale, è stato utilizzato lo scanner GOM ATOS Q per catturare la geometria dei servo e degli ingranaggi del robot. Il software di metrologia ha rilevato deviazioni di appena poche micron sulle superfici di contatto, un'usura asimmetrica impossibile da vedere a occhio nudo. Questo modello di usura è stato correlato con le micro-vibrazioni costanti registrate in MATLAB durante l'operazione. La latenza nel segnale di controllo, sebbene impercettibile per il chirurgo, ha causato l'oscillazione e la correzione eccessiva dei servo, generando fatica ciclica nei denti degli ingranaggi in lega. Modelli in SolidWorks hanno confermato che la tensione accumulata ha superato il limite di fatica del materiale, causando la perdita di precisione millimetrica.
Lezioni per gemelli digitali e controllo predittivo ⚙️
Questo caso dimostra che la robotica chirurgica non dipende solo dalla precisione del software, ma dall'integrità meccanica a scala micrometrica. La soluzione proposta prevede l'implementazione di gemelli digitali in Blender e SolidWorks che simulino l'usura in tempo reale, alimentati da dati di latenza. Un sistema di manutenzione predittiva, basato sull'analisi degli spettri di vibrazione di MATLAB, potrebbe rilevare queste oscillazioni prima che generino un'usura critica. Il guasto non è stato dell'hardware, ma di un progetto di controllo che ha ignorato la fatica meccanica indotta dalla rete.
Come può l'industria della robotica chirurgica mitigare il rischio di micro-usura negli attuatori causato dalla latenza del segnale nelle operazioni di telechirurgia a lunga distanza?
(PS: Simulare robot è divertente, finché non decidono di non seguire i tuoi ordini.)