Una fuga postoperatoria dopo una resezione intestinale assistita da robot ha fatto scattare l'allarme in un ospedale di riferimento. Il sospetto iniziale puntava a un errore del chirurgo, ma l'analisi forense tramite micro-TAC ha rivelato una verità più complessa: le graffette di titanio presentavano una deformazione insufficiente. Questa scoperta ha spostato l'indagine verso il software del robot e la sua capacità di calcolare la forza di compressione adeguata in base allo spessore del tessuto.
Ricostruzione micro-TAC e simulazione agli elementi finiti in Abaqus 🧬
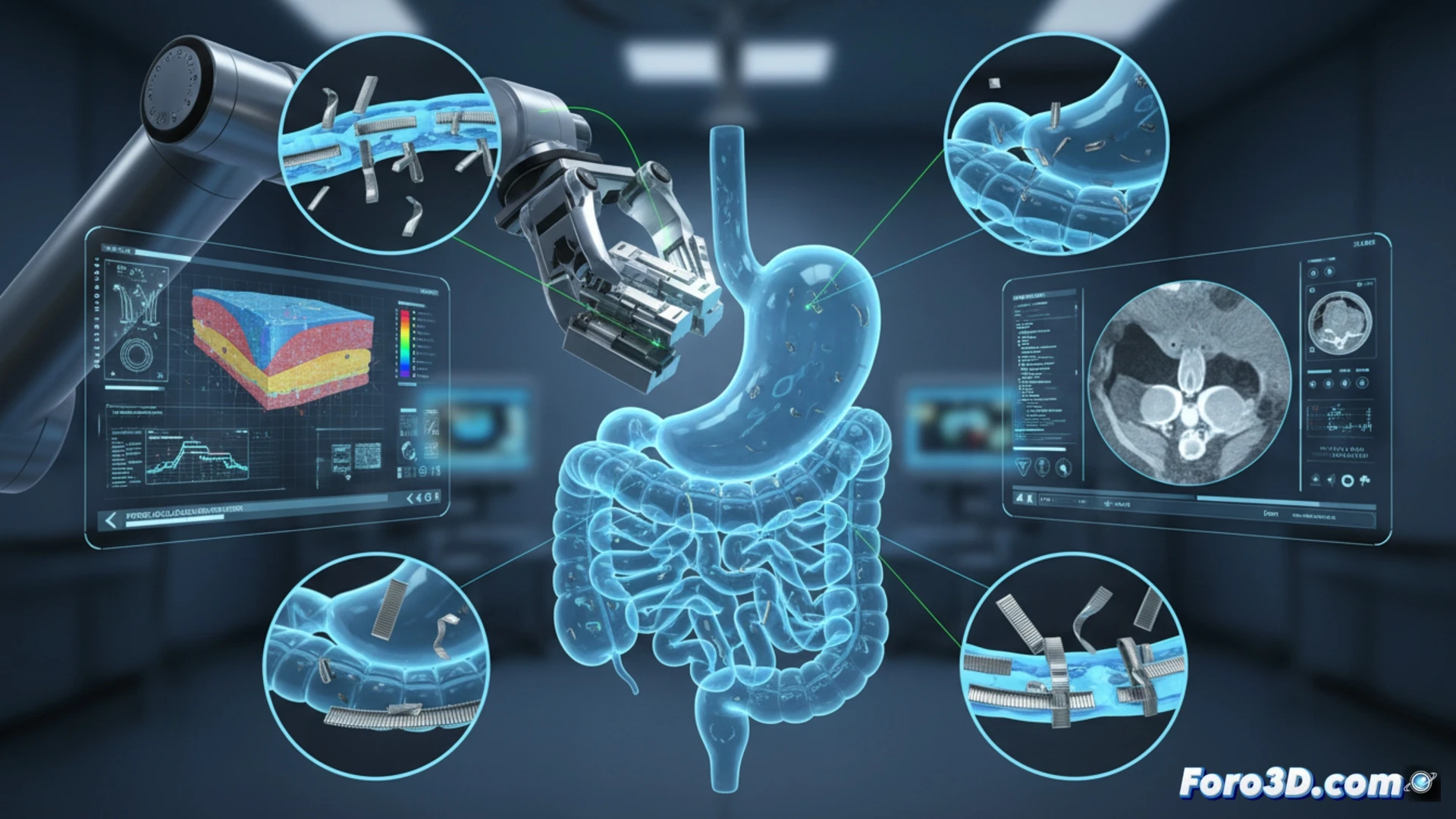
Il team forense ha digitalizzato le graffette estratte tramite micro-TAC, generando modelli 3D ad alta risoluzione in Materialise Mimics. Confrontando la geometria reale delle graffette deformate con la simulazione ideale in Abaqus, è emersa una discrepanza critica. Il software del robot aveva applicato una forza di compressione equivalente a quella di un tessuto di 1,5 mm, mentre lo spessore reale della parete intestinale era di 2,8 mm. Questa sottostima ha fatto sì che le graffette non raggiungessero l'altezza di chiusura necessaria per sigillare il tessuto, lasciando microcanali attraverso i quali si è verificata la fuga.
Calibrazione robotica: lo spessore del tessuto come variabile non negoziabile 🤖
Il caso dimostra che la precisione meccanica del robot è inutile se gli algoritmi non integrano correttamente la biomeccanica del paziente. La lezione è chiara: i sistemi di chirurgia robotica devono calibrare i loro parametri di compressione in tempo reale, utilizzando sensori o dati preoperatori di tomografia. Ignorare la variabilità dello spessore tissutale trasforma uno strumento ad alta tecnologia in un rischio evitabile per il paziente.
Come si può utilizzare l'analisi 3D della morfologia e deformazione di graffette fallite per prevedere e prevenire le fughe anastomotiche nella chirurgia robotica gastrointestinale.
(PS: Se stampi un cuore in 3D, assicurati che batta... o almeno che non dia problemi di copyright.)