Il recente incidente di usura su un braccio robotico chirurgico riapre il dibattito sulla fatica dei materiali in ambienti di alta precisione. A differenza della robotica industriale, dove un guasto può fermare una linea di produzione, in chirurgia assistita l'usura compromette direttamente la sicurezza del paziente. Questo articolo tecnico analizza le cause del deterioramento meccanico, l'uso di gemelli digitali per simulare lo stress ciclico e le strategie di manutenzione predittiva basate su modelli 3D.
Simulazione dei punti critici di fatica tramite gemelli digitali 🔧
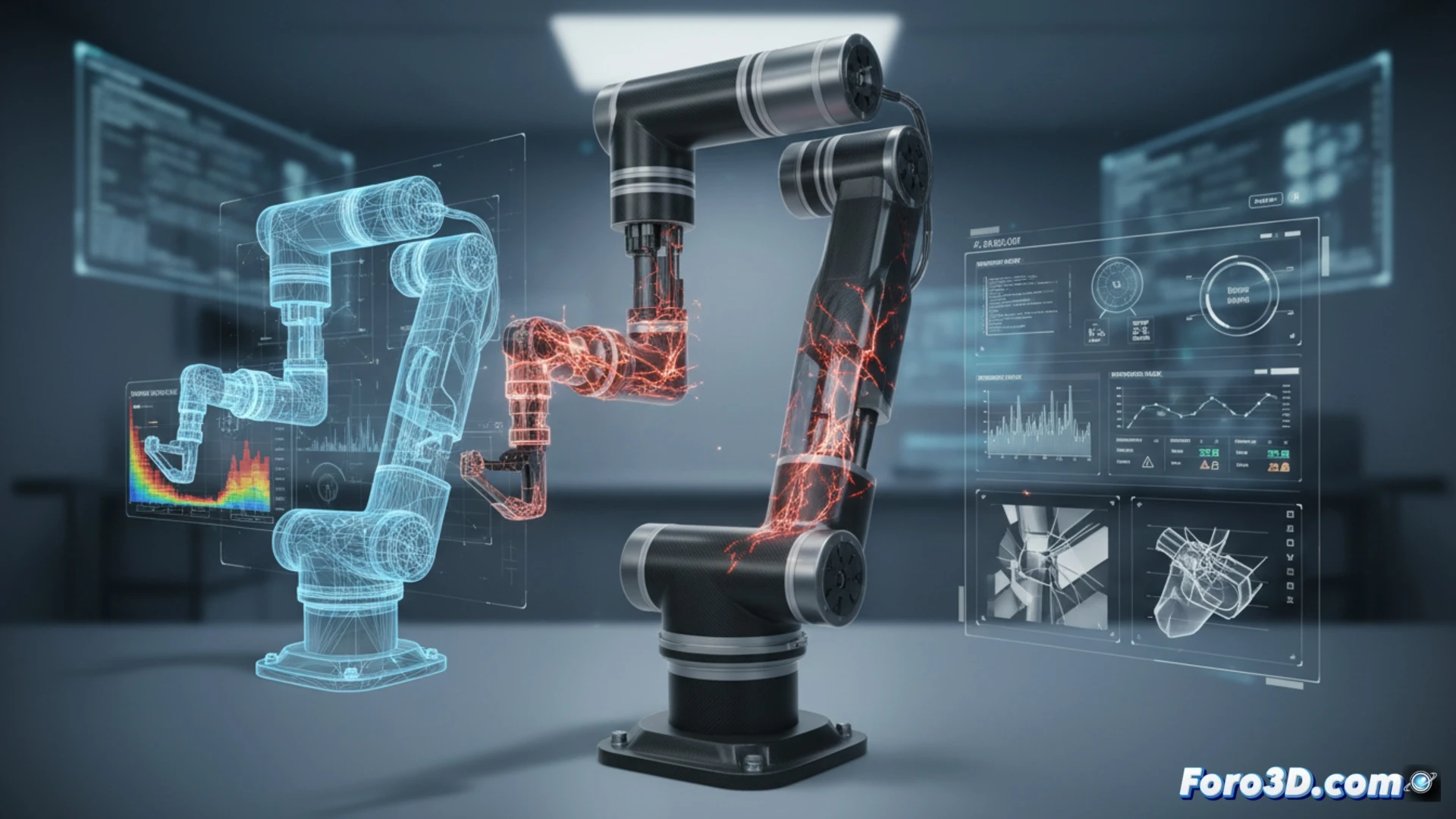
L'usura in un braccio robotico chirurgico tende a concentrarsi nelle articolazioni a sfera e nei riduttori armonici, dove la coppia torsionale ripetitiva genera microfessure. Tramite simulazioni agli elementi finiti integrate nei gemelli digitali, gli ingegneri possono visualizzare la distribuzione delle tensioni in tempo reale. Ad esempio, un modello 3D del braccio Da Vinci permette di identificare che il gomito sopporta un carico del 40% superiore rispetto a quanto stimato nei progetti iniziali. Questa tecnica, combinata con sensori di vibrazione, consente di prevedere guasti con settimane di anticipo, regolando i cicli di lubrificazione o la sostituzione di componenti critici prima di un intervento reale.
Implicazioni sulla sicurezza e il dilemma della manutenzione reattiva ⚠️
La lezione principale di questo incidente è che la robotica medica non può permettersi un approccio reattivo. Ogni micro-usura non rilevata può tradursi in una deviazione millimetrica durante una sutura. L'uso di simulazioni 3D non solo ottimizza i costi di manutenzione, ma ridefinisce i protocolli di certificazione. Richiedere che ogni braccio chirurgico abbia un gemello digitale aggiornato con dati di fatica dovrebbe essere uno standard, non un'opzione. La tecnologia per prevedere il guasto esiste; la sfida è implementarla prima che l'usura diventi un rischio evitabile.
Considerando il recente incidente di usura su un braccio robotico chirurgico, quali metodologie di simulazione predittiva o sensori di monitoraggio in tempo reale potrebbero essere implementati per anticipare la fatica meccanica nelle articolazioni prima che comprometta la sicurezza del paziente?
(PS: Simulare robot è divertente, finché non decidono di non seguire i tuoi ordini.)