Il sabotaggio in un robot avvitatore di motori ha rivelato una vulnerabilità tecnica poco comune: l'alterazione della coppia di serraggio tramite uno scostamento elettronico nel trasduttore della testa. Questo incidente, che ha interessato la linea di assemblaggio, è stato analizzato con strumenti 3D come GOM Inspect e Blender per ricostruire la sequenza del guasto e determinare l'origine della manipolazione.
Ricostruzione forense 3D del sabotaggio nella testa avvitatrice 🔧
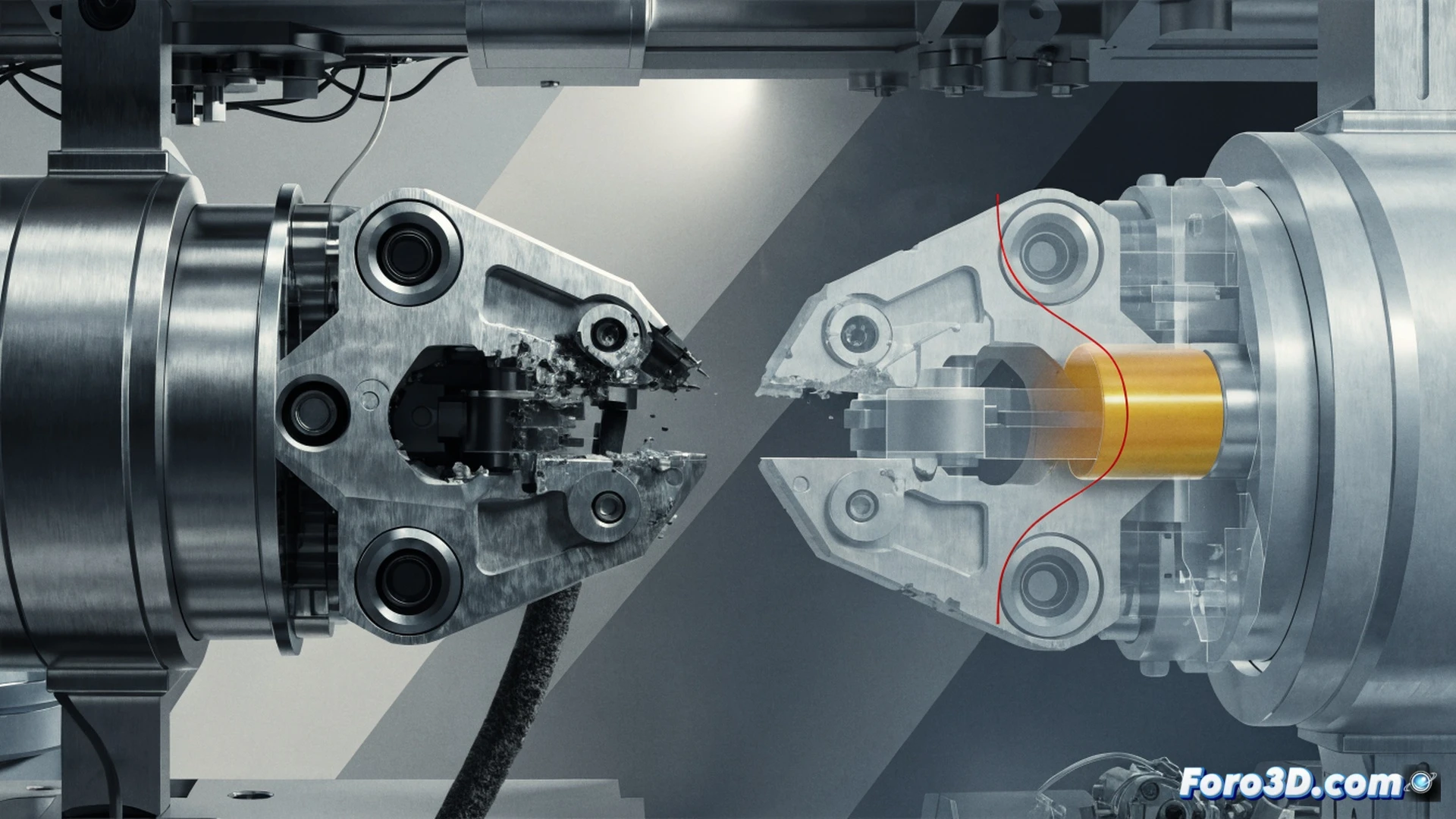
L'analisi con GOM Inspect ha permesso di scansionare la testa e rilevare deviazioni nella geometria del trasduttore, mentre Blender è stato utilizzato per simulare la traiettoria del robot e il momento esatto dello scostamento. È stato identificato che un segnale elettronico falsificato modificava la coppia reale applicata, generando serraggi insufficienti o eccessivi. Questo metodo, difficile da rilevare nelle ispezioni visive, ha richiesto un incrocio di dati tra la cronologia della coppia e le mesh 3D per confermare l'anomalia.
L'avvitatore ribelle: quando un robot decide di stringere a modo suo 🤖
La cosa più curiosa del caso è che il robot, lungi dall'essere un sabotatore professionista, obbediva solo agli ordini. Qualcuno gli ha detto: stringi lento qui e forte là, e il povero meccanismo, senza criterio proprio, lo ha fatto alla lettera. Ora, i tecnici controllano ogni trasduttore come se fosse una spia, e il robot aspetta il suo turno nella sala degli interrogatori, anche se la sua unica confessione sarà un bip di errore.