Un modello 3D preventivo elimina i punti ciechi nella sicurezza
Pianificare un sistema di sorveglianza efficace non dipende più da supposizioni. Gli esperti ora costruiscono un gemello digitale dello spazio reale utilizzando tecnologie di scansione 3D. Questo modello diventa il campo di prova definitivo per progettare, testare e raffinare ogni componente prima della sua installazione fisica, eliminando l'errore umano. 🎯
Creare la base digitale con precisione millimetrica
Il primo passo è catturare la realtà. Uno scanner laser, come il Leica RTC360, registra la geometria completa di un ambiente, ad esempio, un museo. Questo dispositivo genera una nube di punti estremamente densa e precisa. I tecnici poi elaborano questi dati in software specializzato, come Autodesk ReCap, per generare un modello 3D solido e pronto all'uso. Questa replica virtuale contiene ogni colonna, vetrina e corridoio con esattezza.
Vantaggi chiave della scansione iniziale:- Precisione assoluta: Si catturano dimensioni e ostacoli senza margine di errore.
- Documentazione completa: Si ottiene un registro 3D permanente dello stato del sito.
- Base per simulazioni: Il modello è l'ambiente in cui si testerà l'intero sistema.
Il vero ladro nella sicurezza è la supposizione che posizionare telecamere a caso funzioni. La simulazione 3D lascia senza argomenti l'improvvisazione.
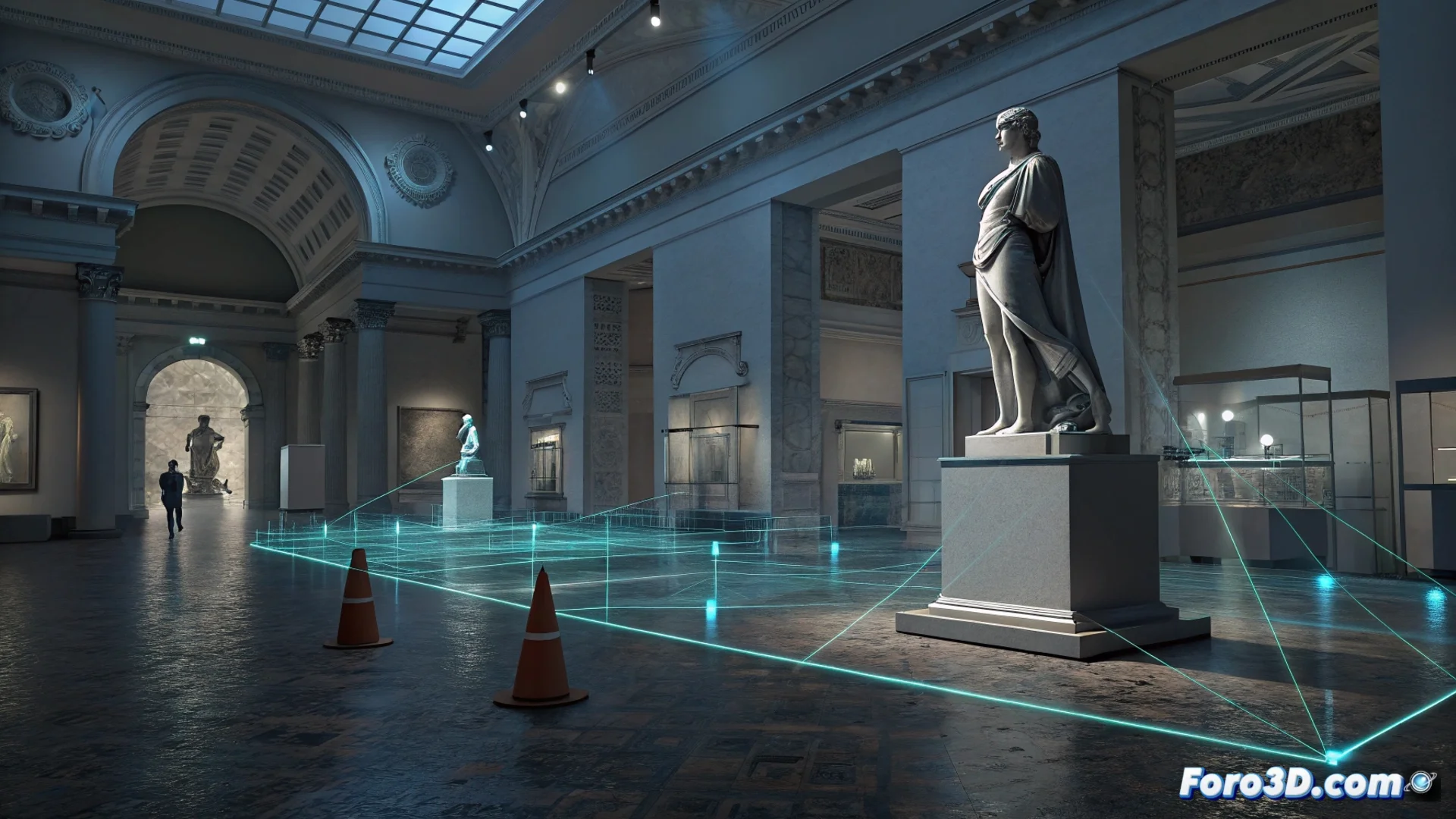
Simulare e analizzare la copertura nel motore 3D
Con il modello 3D caricato in un motore come Unreal Engine o Unity, inizia la fase di progettazione attiva. I progettisti posizionano telecamere di sorveglianza virtuali nelle posizioni proposte. Configurano parametri tecnici reali: distanza focale, risoluzione, angolo di inclinazione e campo visivo. Il software renderizza la prospettiva di ogni telecamera, calcolando automaticamente le zone coperte e, in modo critico, le ombre e le ostruzioni generate dagli oggetti dell'ambiente. Così si rivelano i corridoi o gli angoli dove una persona potrebbe muoversi senza essere rilevata: i punti ciechi.
Parametri che si simulano:- Campo visivo (FOV) e raggio effettivo di ogni telecamera.
- Effetto di ostacoli architettonici e arredi.
- Interazione dell'illuminazione ambientale con la visione della telecamera.
Ottimizzare la progettazione e validare l'installazione
Identificare i punti ciechi permette di iterare la progettazione immediatamente. I tecnici regolano posizioni, cambiano tipi di lente o aggiungono dispositivi aggiuntivi direttamente nel modello. Strumenti come il JVSG IP Video System Design Tool aiutano a raffinare questo processo tecnico. L'obiettivo finale è ottenere una copertura sovrapposta, dove il campo visivo di una telecamera copra l'area cieca di un'altra. Solo quando la simulazione valida una copertura totale e senza lacune, si approva il piano per installare il sistema fisico. Questo metodo risparmia tempo, riduce i costi per ritrattamenti e garantisce che il sistema funzionerà come progettato dal primo giorno. ✅