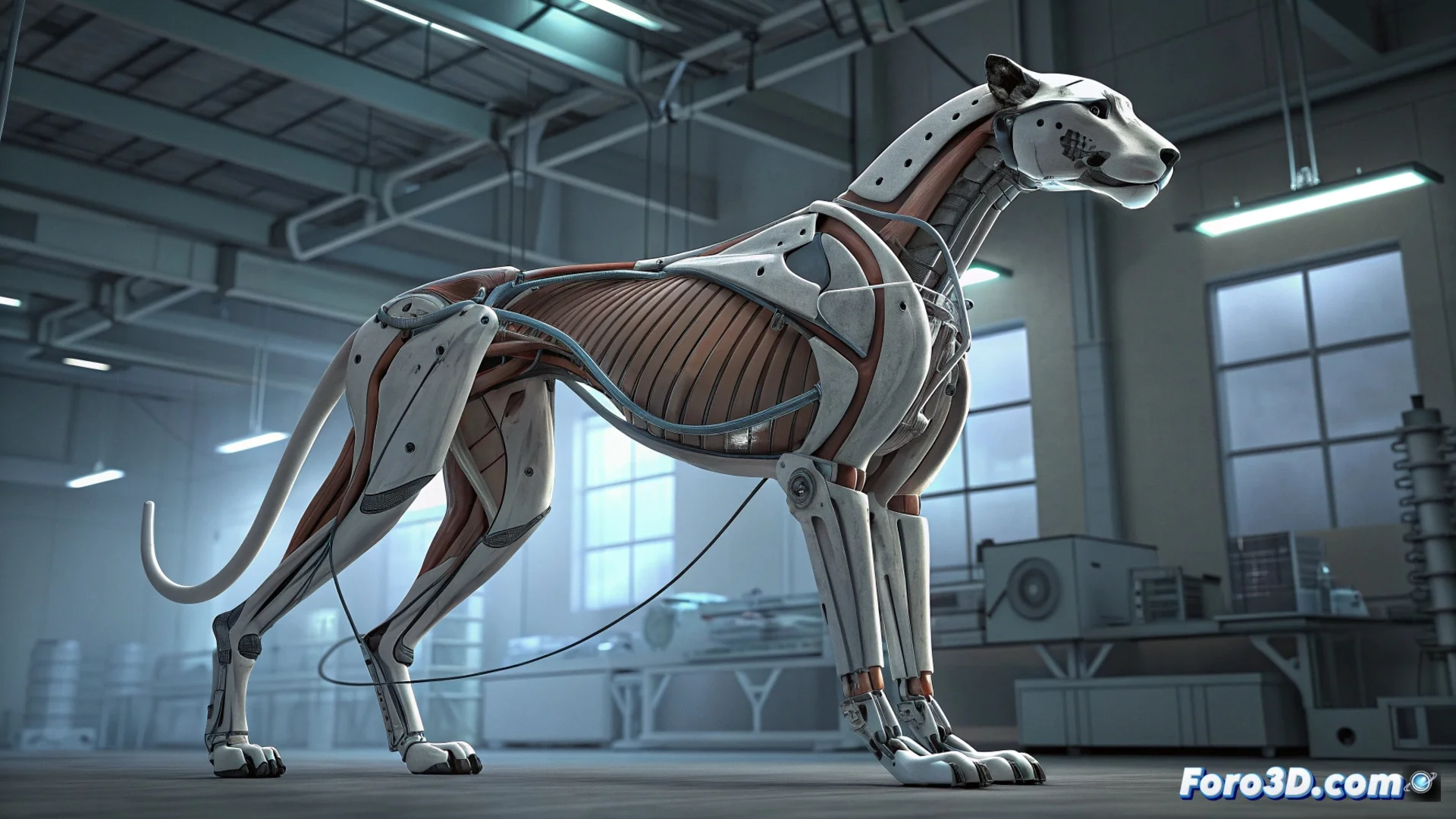
Pneupard: un robot quadrupede pneumatico che imita un ghepardo
All'Università di Osaka, un team scientifico sviluppa un robot quadrupede chiamato Pneupard, il cui sistema di propulsione si basa esclusivamente su aria compressa. Questo progetto cerca di replicare la meccanica dei muscoli di un ghepardo, l'animale terrestre più veloce. Sostituendo i motori elettrici con attuatori pneumatici, il robot acquisisce una flessibilità naturale che gli permette di muoversi in modo dinamico e adattarsi al terreno. 🐆
La pneumatica definisce la sua mobilità e flessibilità
Il sistema pneumatico è il nucleo delle capacità di Pneupard. Gli attuatori, alimentati da aria a pressione, si espandono e contraggono per simulare la contrazione muscolare reale. Questo produce una locomozione che non solo è potenzialmente rapida, ma anche fluida e con un'elasticità intrinseca. La compliance o adattabilità di questi componenti permette al robot di interagire con il suo ambiente in modo più sicuro, poiché può ammortizzare impatti e modulare la sua forza nello spostamento. Questo approccio rappresenta un'alternativa promettente per progettare robot che debbano operare su terreni irregolari o variabili.
Vantaggi chiave del sistema pneumatico:- Fornisce una flessibilità intrinseca che imita i tessuti biologici.
- Permette movimenti rapidi e un'assorbimento naturale degli impatti.
- Facilita un'interazione più sicura con ambienti imprevedibili.
L'eleganza del movimento naturale richiede più che solo imitare la forma; necessita di replicare la fisica dei muscoli.
Un laboratorio fisico per capire come si muovono gli animali
Lo scopo principale di Pneupard non è commerciale, ma servire come strumento di ricerca avanzato. I ricercatori lo impiegano come un modello fisico tangibile per testare teorie su come gli animali coordinano le loro estremità e mantengono l'equilibrio. Analizzando i dati dei suoi pattern di marcia, si può comprendere meglio l'efficienza energetica, la stabilità e i ritmi della locomozione in natura.
Applicazioni potenziali di questa ricerca:- Migliorare il design di robot caminatori per soccorso o esplorazione.
- Ispirare lo sviluppo di protesi robotiche più naturali e adattive.
- Creare nuovi sistemi di riabilitazione fisica basati su movimenti biologici.
La strada da percorrere tra l'imitazione e l'uguaglianza
Sebbene la sua ispirazione sia il veloce ghepardo, la velocità attuale di Pneupard assomiglia più a una passeggiata tranquilla che a una corsa. Questo dettaglio sottolinea un principio fondamentale: emulare la sofisticatezza e l'efficienza dei sistemi biologici è una sfida ingegneristica complessa. Pneupard non è la destinazione finale, ma un passo cruciale per chiudere il ciclo tra la biologia e la robotica, dimostrando che a volte la soluzione più elegante può essere impulsata da semplice aria compressa. 🤖