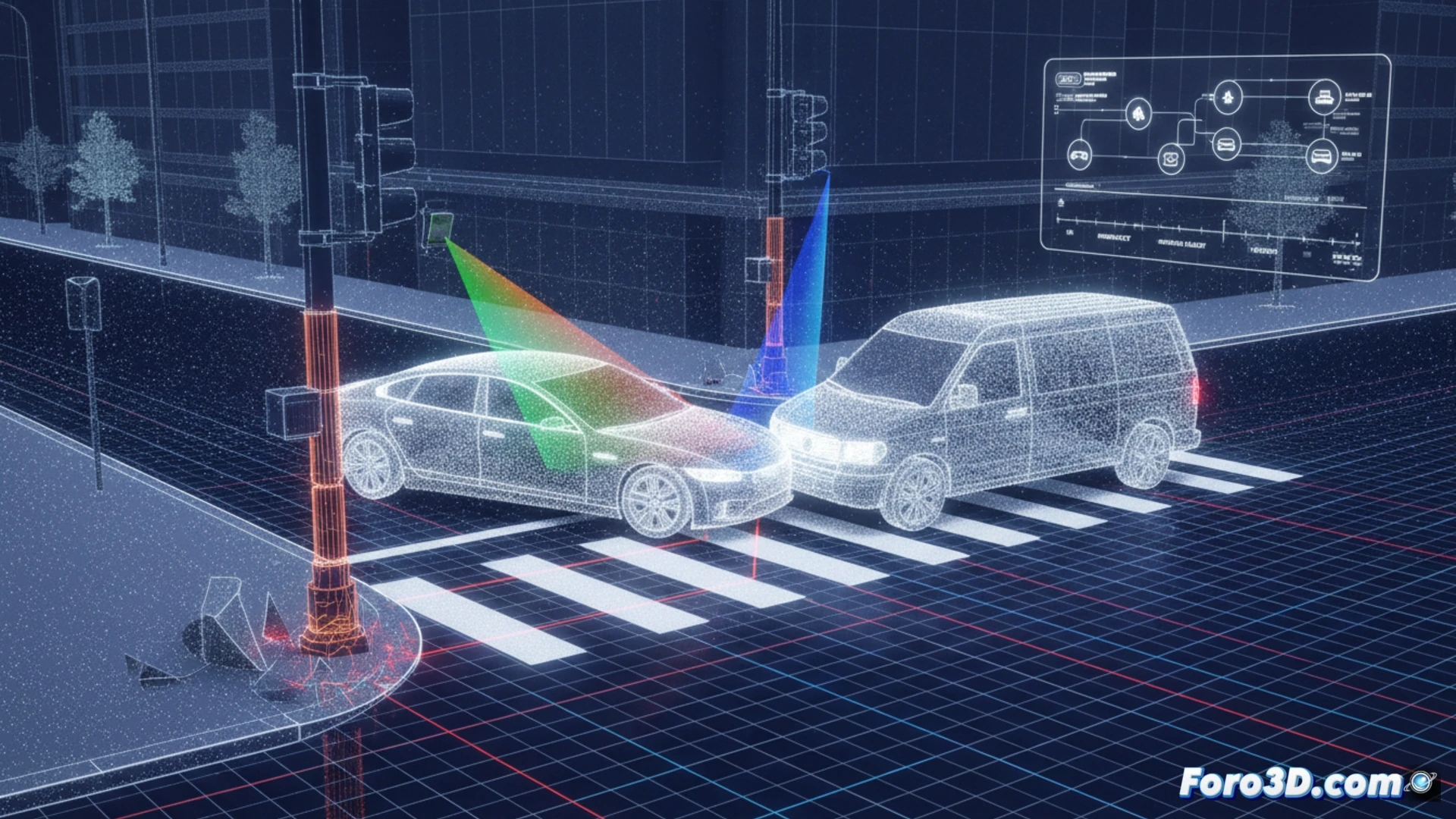
पिछले महीने, V2X बुनियादी ढांचे के LiDAR सेंसर से सुसज्जित एक स्मार्ट चौराहा दो स्वायत्त वाहनों के बीच दुर्घटना का स्थल बन गया। नियंत्रण प्रणाली की स्पष्ट विफलता से हैरान अधिकारियों ने तथ्यों को स्पष्ट करने के लिए 3D फोरेंसिक पाइपलाइन का सहारा लिया। मुख्य परिकल्पना माउंटिंग पोल के तापीय विस्तार के कारण उत्पन्न अंशांकन त्रुटि की ओर इशारा करती थी, जो वास्तविक समय में पता लगाना मुश्किल लेकिन इन वातावरणों की सुरक्षा के लिए महत्वपूर्ण विफलता है।
तकनीकी कार्यप्रवाह: बिंदु बादल से UE5 में सिमुलेशन तक 🛠️
प्रक्रिया प्रभाव से पहले के सेकंड के दौरान चौराहे के LiDAR द्वारा दर्ज किए गए कच्चे बिंदु बादलों को निकालने के साथ शुरू हुई। पहला महत्वपूर्ण कदम इन आंकड़ों को CloudCompare में आयात करना था, जहां सिविल कार्य के CAD मॉडल के विरुद्ध स्थिर बिंदु बादलों (पोल, कर्ब) का एक बढ़िया संरेखण (ICP पंजीकरण) किया गया। इस तुलना ने Z-अक्ष पर बादल के 4.2 सेंटीमीटर के प्रगतिशील विस्थापन का खुलासा किया, जो परिवेश के तापमान के चरम के साथ मेल खाता था। अंशांकन त्रुटि की पुष्टि करने के बाद, प्रभाव की गतिकी की गणना के लिए वाहनों के सही किए गए प्रक्षेपवक्र को MATLAB में निर्यात किया गया। अंत में, साफ किए गए आंकड़े और वाहनों के जाल को Unreal Engine 5 में एकीकृत किया गया, जहां टक्कर के सटीक बिंदु और विफल बचाव पैंतरेबाज़ी की कल्पना करने के लिए HDR प्रकाश व्यवस्था और यथार्थवादी भौतिकी के साथ दृश्य को फिर से बनाया गया।
LiDAR बुनियादी ढांचे के सत्यापन के लिए सबक 📐
यह मामला V2X सेंसर में गतिशील अंशांकन प्रक्रियाओं को लागू करने की आवश्यकता को रेखांकित करता है। पोल का विस्तार, एक अनुमानित भौतिक घटना, एक स्वायत्त वाहन की धारणा को विकृत कर सकता है, बिना ऑनबोर्ड सिस्टम इसका पता लगाए। ज्यामितीय विश्लेषण के लिए CloudCompare और दृश्य सिमुलेशन के लिए Unreal Engine 5 जैसे उपकरणों का संयोजन कनेक्टेड गतिशीलता दुर्घटना जांच में वास्तविक मानक के रूप में मजबूत हो रहा है। यह केवल दुर्घटना का पुनर्निर्माण करने के बारे में नहीं है, बल्कि यह समझने के बारे में है कि भौतिक वातावरण और डिजिटल बुनियादी ढांचा जीवन को विफल करने या बचाने के लिए कैसे परस्पर क्रिया करते हैं।
क्या ऊपर वर्णित दुर्घटना होने से पहले स्थिर वस्तुओं के परावर्तन पैटर्न के विश्लेषण के माध्यम से V2X चौराहे पर LiDAR अंशांकन त्रुटि का पता लगाना संभव है?
(पी.एस.: दृश्य विश्लेषण में, प्रत्येक पैमाने का गवाह एक छोटा गुमनाम नायक है।)