हाल ही में एक रिमोट ऑपरेशन के दौरान एक सर्जिकल रोबोट की विफलता ने ऑटोमेशन क्षेत्र में अलार्म बजा दिया है। यह घटना, जहां स्केलपेल ने एक घातक अनियमित गति की, रोबोटिक आर्म में उत्पन्न हुई। ऑप्टिकल मेट्रोलॉजी के साथ एक फोरेंसिक विश्लेषण से पता चला कि इसका कारण सॉफ्टवेयर त्रुटि नहीं था, बल्कि सर्वो मोटर और गियर में एक असममित माइक्रो-वियर था, जो नियंत्रण सिग्नल में विलंबता के कारण प्रेरित हुआ।
सटीक मेट्रोलॉजी: स्कैनिंग और थकान विश्लेषण 🔬
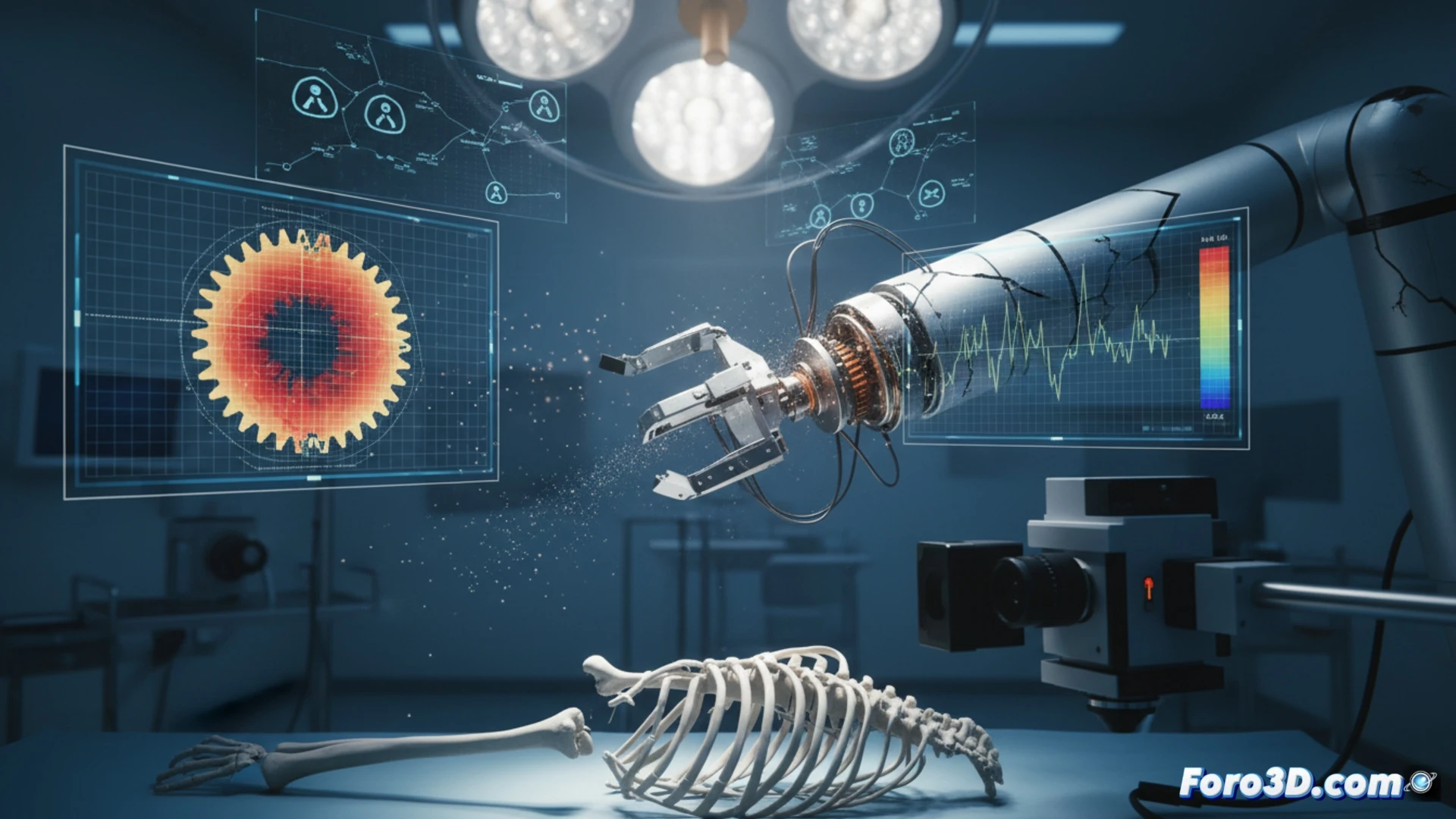
मूल कारण निर्धारित करने के लिए, रोबोट के सर्वो और गियर की ज्यामिति को कैप्चर करने के लिए GOM ATOS Q स्कैनर का उपयोग किया गया। मेट्रोलॉजी सॉफ्टवेयर ने संपर्क सतहों पर कुछ माइक्रोन के विचलन का पता लगाया, एक असममित घिसाव जो नग्न आंखों से देखना असंभव है। घिसाव का यह पैटर्न ऑपरेशन के दौरान MATLAB में दर्ज निरंतर माइक्रो-वाइब्रेशन से संबंधित था। नियंत्रण सिग्नल में विलंबता, हालांकि सर्जन के लिए अगोचर थी, के कारण सर्वो दोलन करते थे और अत्यधिक सुधार करते थे, जिससे मिश्र धातु के गियर के दांतों में चक्रीय थकान उत्पन्न होती थी। SolidWorks में मॉडलों ने पुष्टि की कि संचित तनाव सामग्री की थकान सीमा से अधिक हो गया, जिससे मिलीमीटर सटीकता का नुकसान हुआ।
डिजिटल ट्विन और पूर्वानुमानित नियंत्रण के लिए सबक ⚙️
यह मामला दर्शाता है कि सर्जिकल रोबोटिक्स न केवल सॉफ्टवेयर की सटीकता पर निर्भर करता है, बल्कि माइक्रोमीटर पैमाने पर यांत्रिक अखंडता पर भी निर्भर करता है। प्रस्तावित समाधान में Blender और SolidWorks में डिजिटल ट्विन लागू करना शामिल है जो विलंबता डेटा द्वारा संचालित वास्तविक समय में घिसाव का अनुकरण करते हैं। MATLAB से कंपन स्पेक्ट्रा के विश्लेषण पर आधारित एक पूर्वानुमानित रखरखाव प्रणाली, महत्वपूर्ण घिसाव उत्पन्न करने से पहले इन दोलनों का पता लगा सकती है। विफलता हार्डवेयर की नहीं थी, बल्कि एक नियंत्रण डिजाइन की थी जिसने नेटवर्क द्वारा प्रेरित यांत्रिक थकान को नजरअंदाज कर दिया।
सर्जिकल रोबोटिक्स उद्योग लंबी दूरी की टेली-सर्जरी ऑपरेशन में सिग्नल विलंबता के कारण एक्चुएटर्स में माइक्रो-वियर के जोखिम को कैसे कम कर सकता है?
(पी.एस.: रोबोट का अनुकरण करना मजेदार है, जब तक वे आपके आदेशों का पालन न करने का निर्णय न लें।)