रोबोट-सहायता प्राप्त आंत्र उच्छेदन के बाद पोस्टऑपरेटिव लीक ने एक रेफरल अस्पताल में अलार्म बजा दिया। प्रारंभिक संदेह सर्जन की त्रुटि की ओर इशारा करता था, लेकिन माइक्रो-सीटी के माध्यम से फोरेंसिक विश्लेषण ने एक अधिक जटिल सच्चाई का खुलासा किया: टाइटेनियम स्टेपल्स में अपर्याप्त विरूपण था। इस खोज ने जांच को रोबोट के सॉफ्टवेयर और ऊतक की मोटाई के अनुसार उपयुक्त संपीड़न बल की गणना करने की इसकी क्षमता की ओर स्थानांतरित कर दिया।
माइक्रो-सीटी पुनर्निर्माण और Abaqus में परिमित तत्व सिमुलेशन 🧬
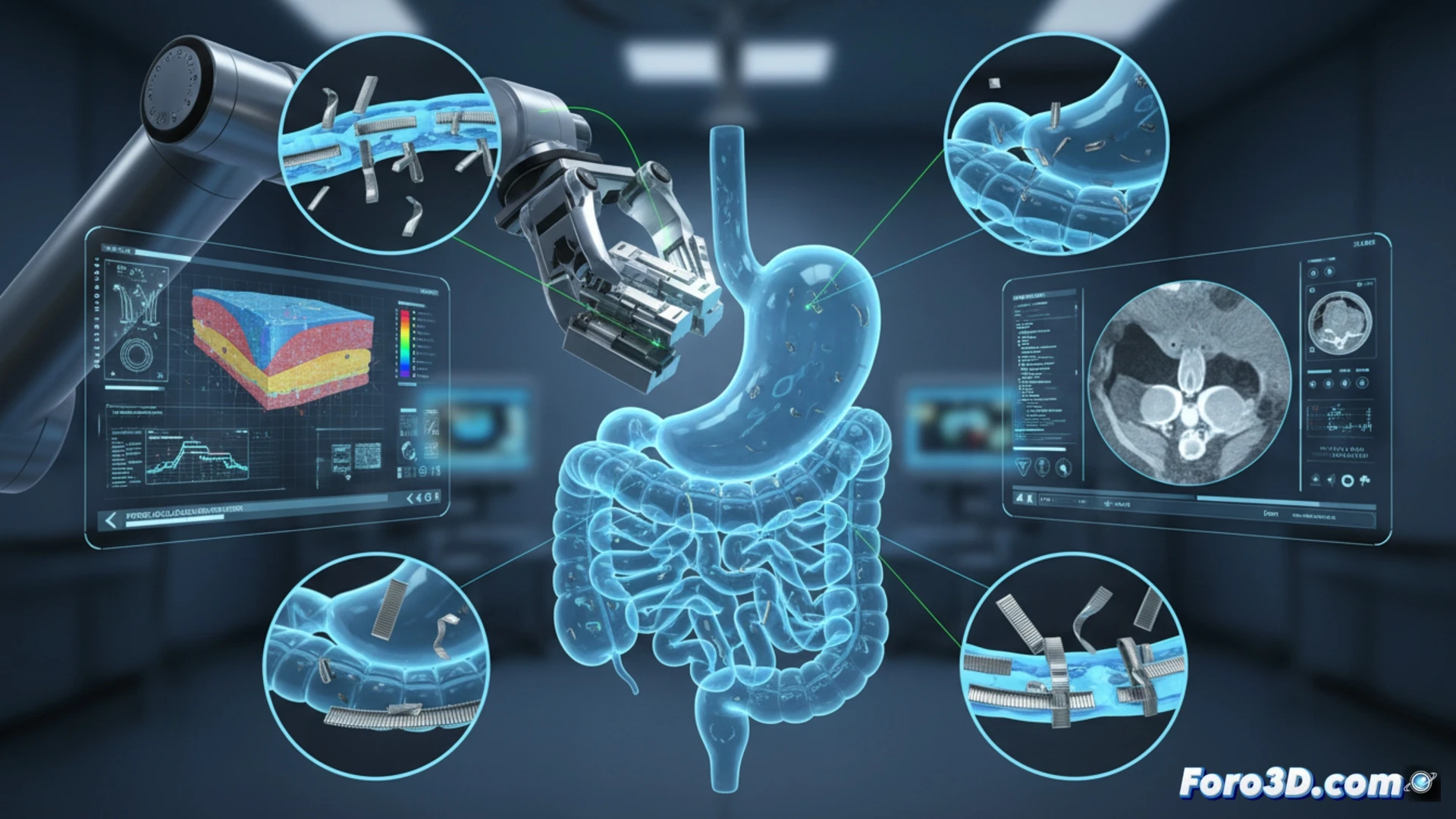
फोरेंसिक टीम ने माइक्रो-सीटी के माध्यम से निकाले गए स्टेपल्स को डिजिटलीकृत किया, Materialise Mimics में उच्च-रिज़ॉल्यूशन 3D मॉडल तैयार किए। विकृत स्टेपल्स की वास्तविक ज्यामिति की Abaqus में आदर्श सिमुलेशन से तुलना करने पर, एक महत्वपूर्ण विसंगति सामने आई। रोबोट के सॉफ्टवेयर ने 1.5 मिमी के ऊतक के बराबर संपीड़न बल लागू किया था, जबकि आंत्र दीवार की वास्तविक मोटाई 2.8 मिमी थी। इस कम आकलन के कारण स्टेपल्स ऊतक को सील करने के लिए आवश्यक समापन ऊंचाई तक नहीं पहुंच पाए, जिससे माइक्रोचैनल बन गए जिनके माध्यम से लीक हुआ।
रोबोटिक अंशांकन: ऊतक की मोटाई एक गैर-परक्राम्य चर के रूप में 🤖
यह मामला दर्शाता है कि यदि एल्गोरिदम रोगी के बायोमैकेनिक्स को सही ढंग से एकीकृत नहीं करते हैं तो रोबोट की यांत्रिक सटीकता बेकार है। सबक स्पष्ट है: रोबोटिक सर्जरी सिस्टम को सेंसर या प्रीऑपरेटिव टोमोग्राफी डेटा का उपयोग करके वास्तविक समय में अपने संपीड़न मापदंडों को कैलिब्रेट करना चाहिए। ऊतक मोटाई की परिवर्तनशीलता को अनदेखा करना एक उच्च तकनीक वाले उपकरण को रोगी के लिए एक टालने योग्य जोखिम में बदल देता है।
रोबोटिक गैस्ट्रोइंटेस्टाइनल सर्जरी में एनास्टोमोटिक लीक की भविष्यवाणी और रोकथाम के लिए विफल स्टेपल्स की आकृति विज्ञान और विरूपण के 3D विश्लेषण का उपयोग कैसे किया जा सकता है।
(पी.एस.: यदि आप 3D में हृदय प्रिंट करते हैं, तो सुनिश्चित करें कि वह धड़कता है... या कम से कम कॉपीराइट समस्या न दे।)