एक 3D पूर्व मॉडल सुरक्षा में अंधे बिंदुओं को समाप्त करता है
एक प्रभावी निगरानी प्रणाली की योजना अब अनुमानों पर निर्भर नहीं करती। विशेषज्ञ अब 3D स्कैनिंग तकनीकों का उपयोग करके वास्तविक स्थान का डिजिटल ट्विन बनाते हैं। यह मॉडल भौतिक स्थापना से पहले प्रत्येक घटक को डिजाइन, परीक्षण और परिष्कृत करने के लिए अंतिम परीक्षण मैदान बन जाता है, मानवीय त्रुटि को समाप्त करते हुए। 🎯
मिलिमीट्रिक सटीकता के साथ डिजिटल आधार बनाना
पहला कदम वास्तविकता को कैप्चर करना है। एक लेजर स्कैनर, जैसे Leica RTC360, किसी पर्यावरण, उदाहरण के लिए एक संग्रहालय, की पूर्ण ज्यामिति को रिकॉर्ड करता है। यह डिवाइस एक अत्यंत घनी और सटीक पॉइंट क्लाउड उत्पन्न करता है। तकनीशियन फिर इन डेटा को विशेष सॉफ्टवेयर, जैसे Autodesk ReCap, में प्रोसेस करते हैं, ताकि एक मजबूत और उपयोग के लिए तैयार 3D मॉडल उत्पन्न हो। यह आभासी प्रतिकृति हर कॉलम, शोकेस और गलियारे को सटीकता के साथ समाहित करती है।
प्रारंभिक स्कैनिंग के प्रमुख लाभ:- पूर्ण सटीकता: आयाम और बाधाओं को त्रुटि के बिना कैप्चर किया जाता है।
- पूर्ण दस्तावेजीकरण: साइट की स्थिति का स्थायी 3D रिकॉर्ड प्राप्त होता है।
- सिमुलेशन के लिए आधार: मॉडल वह पर्यावरण है जहां पूरा सिस्टम परीक्षण किया जाएगा।
सुरक्षा में सच्चा चोर यह धारणा है कि यादृच्छिक रूप से कैमरों को रखना काम करता है। 3D सिमुलेशन तात्कालिकता को बेनकाब कर देती है।
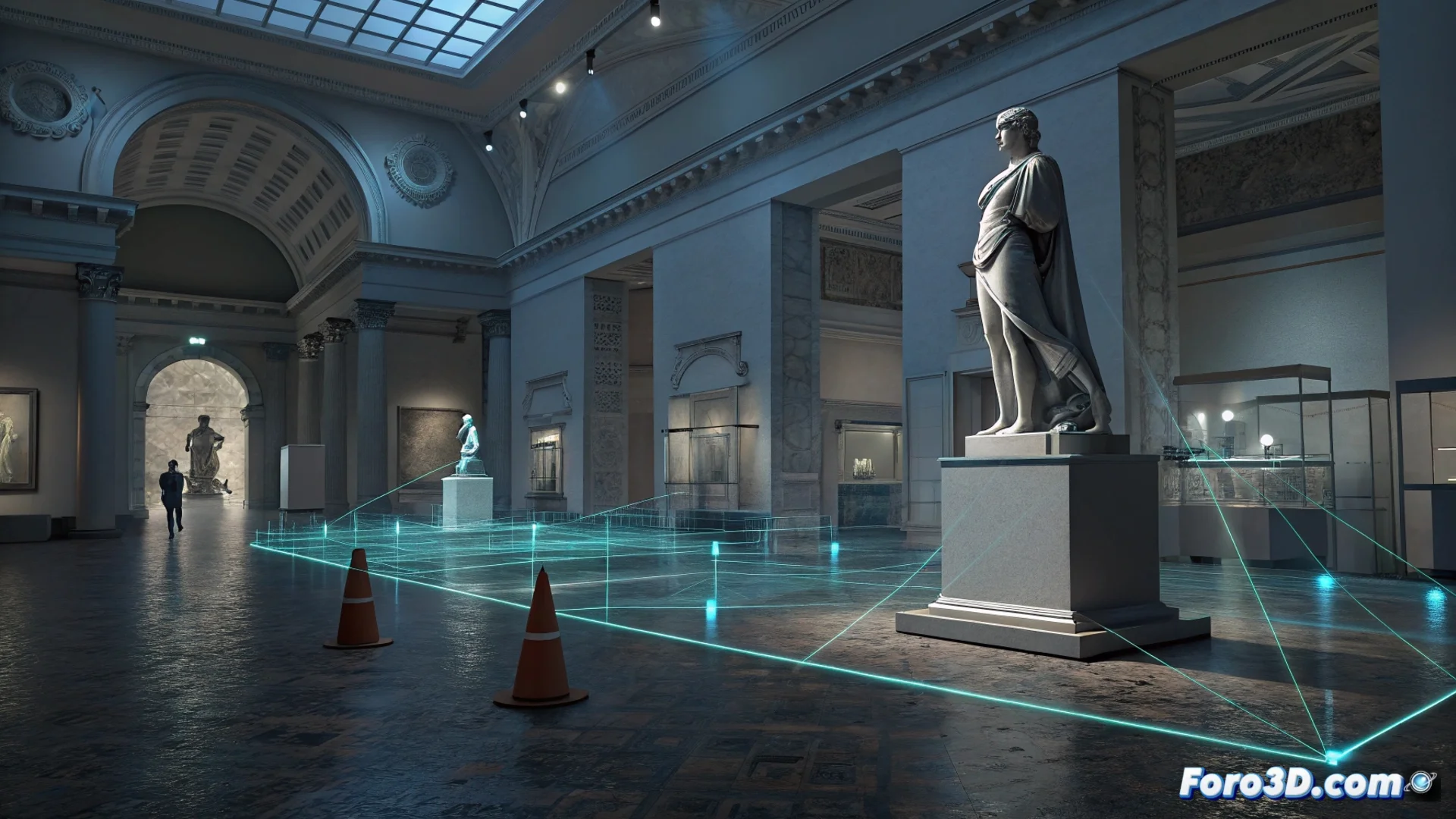
3D इंजन में कवरेज का सिमुलेट और विश्लेषण करना
Unreal Engine या Unity जैसे इंजन में 3D मॉडल लोड करने के साथ, सक्रिय डिजाइन चरण शुरू होता है। प्लानर प्रस्तावित स्थानों पर आभासी निगरानी कैमरों को रखते हैं। वे वास्तविक तकनीकी पैरामीटर सेट करते हैं: फोकल लंबाई, रेजोल्यूशन, झुकाव कोण और दृश्य क्षेत्र। सॉफ्टवेयर प्रत्येक कैमरे की दृष्टिकोण को रेंडर करता है, स्वचालित रूप से कवर की गई जोन की गणना करता है और, महत्वपूर्ण रूप से, पर्यावरण के वस्तुओं द्वारा उत्पन्न छायाएं और बाधाएं। इस प्रकार वे गलियारे या कोने प्रकट होते हैं जहां कोई व्यक्ति बिना पता चले घूम सकता है: अंधे बिंदु।
सिमुलेट किए जाने वाले पैरामीटर:- प्रत्येक कैमरे का दृश्य क्षेत्र (FOV) और प्रभावी रेंज।
- आर्किटेक्चरल बाधाओं और फर्नीचर का प्रभाव।
- पर्यावरणीय प्रकाश का कैमरा विजन के साथ इंटरैक्शन।
डिजाइन को अनुकूलित करना और स्थापना को मान्य करना
अंधे बिंदुओं की पहचान तुरंत डिजाइन को दोहराने की अनुमति देती है। तकनीशियन मॉडल में सीधे स्थिति समायोजित करते हैं, लेंस प्रकार बदलते हैं या अतिरिक्त डिवाइस जोड़ते हैं। JVSG IP Video System Design Tool जैसे टूल इस तकनीकी प्रक्रिया को परिष्कृत करने में मदद करते हैं। अंतिम लक्ष्य ओवरलैपिंग कवरेज प्राप्त करना है, जहां एक कैमरे का दृश्य क्षेत्र दूसरे के अंधे क्षेत्र को कवर करे। केवल जब सिमुलेशन कुल और बिना गैप वाली कवरेज को मान्य करे, तब भौतिक सिस्टम स्थापित करने के लिए प्लान को मंजूरी दी जाती है। यह विधि समय बचाती है, री-वर्क से लागत कम करती है और गारंटी देती है कि सिस्टम पहले दिन से डिजाइन के अनुसार काम करेगा। ✅