L'Aiper Scuba S1 Pro représente un bond en avant dans la robotique de service domestique, éliminant la dépendance aux tuyaux et aux connexions électriques externes. Ce robot nettoyeur de piscine sans fil intègre un système de navigation propriétaire appelé WavePath 2.0, qui lui permet d'effectuer un nettoyage complet du bassin de la piscine. Son autonomie énergétique et sa capacité à escalader les parois et à attaquer la ligne de flottaison en font un cas d'étude idéal pour analyser comment l'automatisation 3D résout des problèmes de maintenance complexes.
Architecture des Capteurs et Algorithme WavePath 2.0 🤖
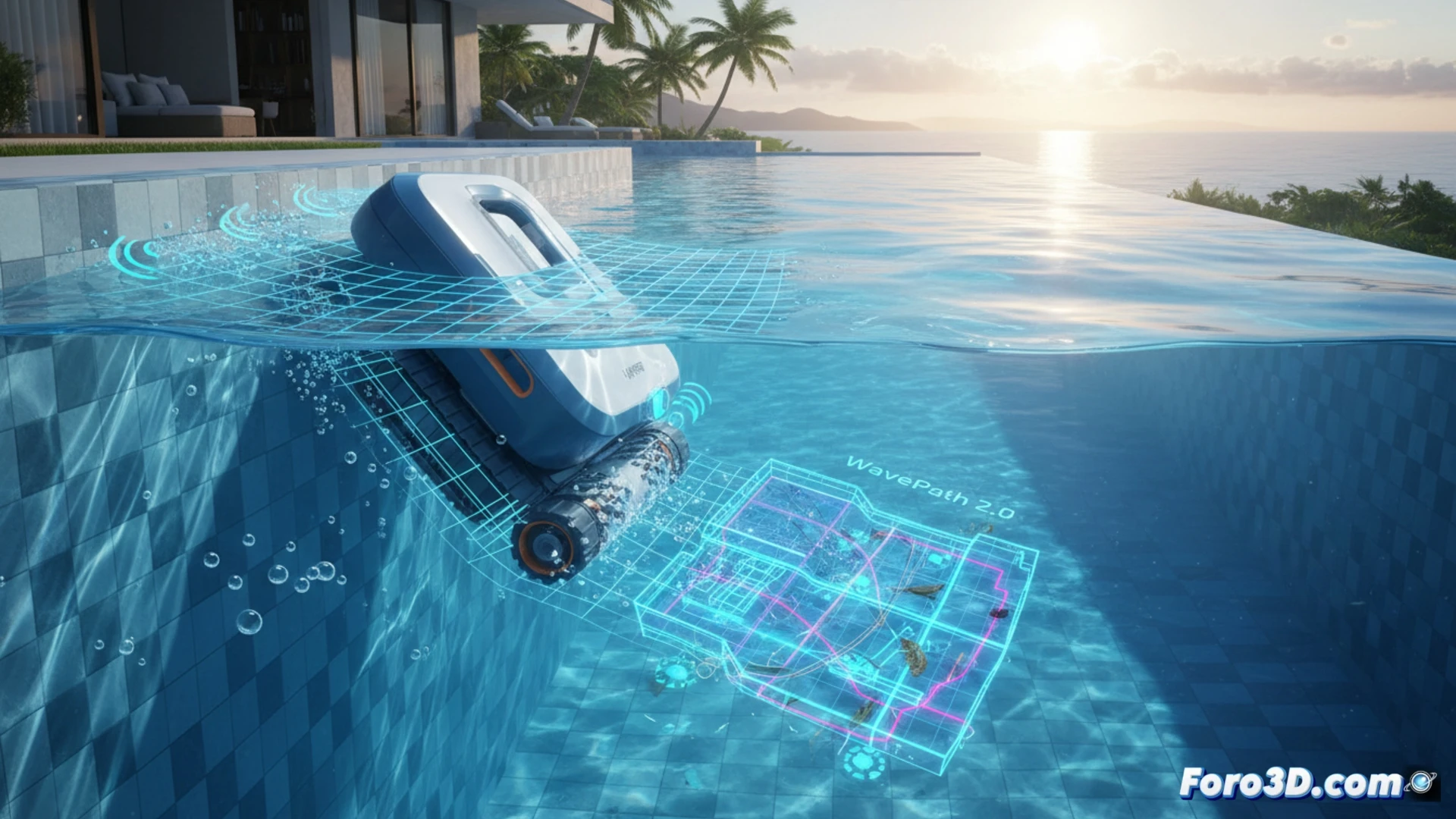
La clé des performances du Scuba S1 Pro réside dans son algorithme de cartographie volumétrique. Contrairement aux robots qui dépendent de capteurs de contact ou de simples gyroscopes, le système WavePath 2.0 utilise une combinaison d'accéléromètres à trois axes et de capteurs de pression différentielle pour construire une carte tridimensionnelle de l'environnement. Le robot ne se contente pas de rebondir aléatoirement ; il calcule des trajectoires en spirale et parallèles pour couvrir le fond, les parois et la ligne d'eau. Lorsqu'il détecte un changement d'angle via le capteur d'inclinaison, il active les moteurs de traction pour escalader la paroi verticale, utilisant l'aspiration générée par sa pompe à double rotor pour adhérer à la surface. Une fois sur la ligne de flottaison, il réduit sa vitesse et déploie ses brosses latérales pour gratter les résidus accumulés, assurant que 100% du périmètre soit couvert sans superpositions inutiles.
Automatisation 3D vs. Systèmes Traditionnels 🏊
Comparé aux robots de piscine câblés ou aux modèles aléatoires, le S1 Pro démontre une efficacité énergétique et temporelle supérieure. Les systèmes traditionnels perdent souvent du temps à nettoyer des zones déjà couvertes ou restent bloqués sur des obstacles comme les escaliers. L'automatisation 3D du Scuba S1 Pro, en cartographiant le volume d'eau complet, optimise le chemin de retour vers la station de charge et priorise les zones de plus grande accumulation de saleté. Cela réduit non seulement le temps de cycle de nettoyage d'environ 30%, mais minimise également l'usure mécanique en évitant les collisions constantes. Ce robot démontre que la véritable innovation en robotique domestique ne réside pas seulement dans la puissance d'aspiration, mais dans l'intelligence nécessaire pour se déplacer efficacement dans un environnement tridimensionnel complexe comme celui d'une piscine.
De quelle manière la mise en œuvre d'algorithmes de navigation autonome dans un robot de piscine comme l'Aiper Scuba S1 Pro résout-elle les principaux défis d'efficacité énergétique et de couverture complète dans des environnements aquatiques non structurés ?
(PS : Simuler des robots est amusant, jusqu'à ce qu'ils décident de ne pas suivre vos ordres.)