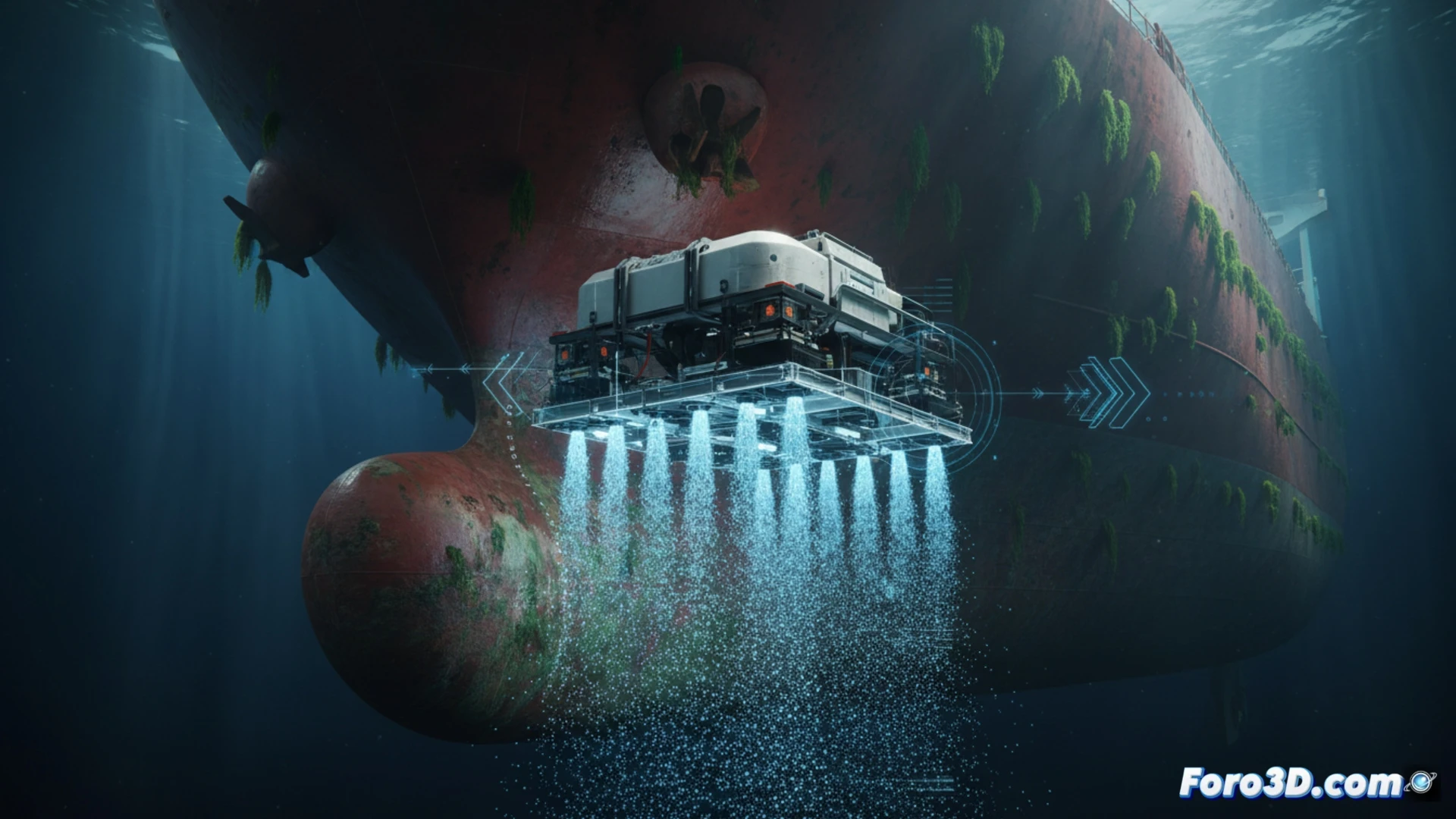
Le HullWiper est un véhicule sous-marin téléopéré (ROV) conçu pour nettoyer les coques de navires à l'aide de jets d'eau à haute pression, sans endommager la peinture anticorrosion. Sa modélisation 3D nécessite de capturer la géométrie de la coque, les buses des jets et la dynamique des fluides. Cet article détaille le flux de travail technique pour simuler son fonctionnement dans des environnements virtuels, optimisant ainsi l'efficacité énergétique et la durée de vie du revêtement naval.
Flux de travail technique : Numérisation, maillage et simulation de trajectoires 🤖
Le processus commence par le balayage laser de la coque du navire pour générer un nuage de points. Celui-ci est converti en un maillage polygonal haute résolution dans un logiciel de CAO (comme Blender ou Rhino). Ensuite, le modèle du ROV HullWiper, conçu avec des servomoteurs et des buses orientables, est intégré. Pour simuler les jets d'eau, on utilise des particules dynamiques ou des fluides basés sur la méthode SPH (Smoothed Particle Hydrodynamics). L'étape suivante consiste à définir des trajectoires de nettoyage à l'aide d'algorithmes de balayage, en évitant les angles qui pourraient éroder la peinture. La simulation finale valide la pression et le temps d'exposition, en ajustant les paramètres pour ne pas dépasser les limites d'adhérence du revêtement.
Optimisation virtuelle : Efficacité et prévention des dommages à la peinture 🚢
La simulation 3D permet de tester des centaines de configurations sans risques réels. En visualisant la distribution de la pression sur la coque, on identifie les zones critiques où le jet pourrait soulever la peinture. En ajustant la distance et l'angle des buses dans le modèle, on obtient un nettoyage uniforme avec 20 % de temps d'opération en moins. Cette approche réduit la consommation de carburant du navire jusqu'à 10 % et prolonge la durée de vie du revêtement, démontrant que la robotique sous-marine et la modélisation 3D sont des alliés indispensables dans l'automatisation navale moderne.
Quels paramètres de simulation CFD doivent être pris en compte dans la modélisation 3D des jets d'eau du ROV HullWiper pour optimiser l'efficacité du nettoyage sans endommager la coque du navire ?
(PS : Simuler des robots est amusant, jusqu'à ce qu'ils décident de ne pas suivre vos ordres.)