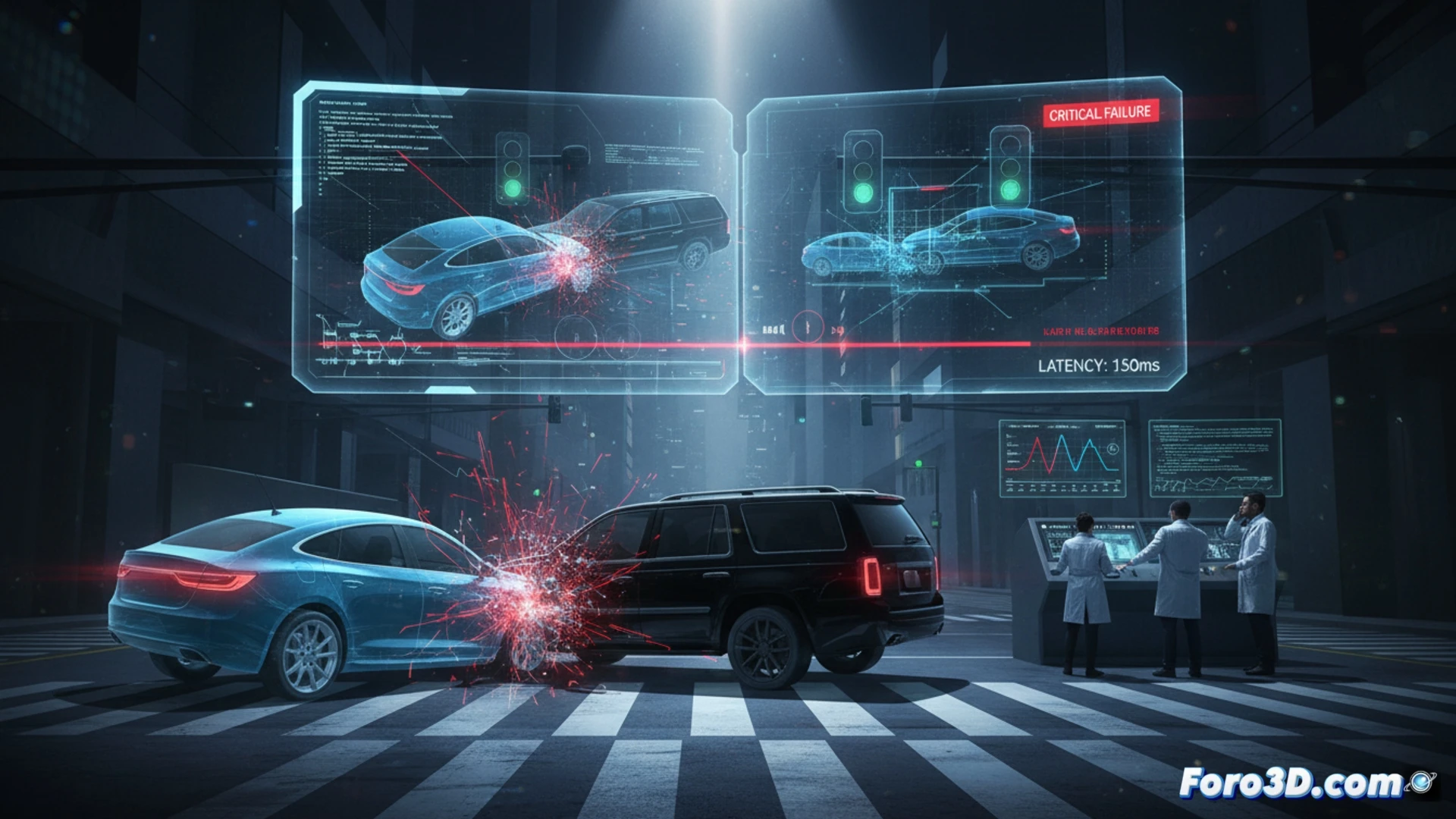
Un accident à une intersection intelligente s'est produit lorsque le feu V2X indiquait la voie libre, mais que le véhicule autonome n'a pas réagi à temps. Pour élucider la panne, un jumeau numérique exact de l'intersection a été construit. Ce modèle a reproduit l'environnement réel en utilisant des données LIDAR de rue, permettant aux ingénieurs d'isoler la variable critique : la latence entre la détection du capteur et la réponse du véhicule. L'objectif était de trouver le décalage temporel qui a transformé un feu vert en piège mortel.
Importation de nuages LIDAR et simulation de latence dans Unity 🚦
Le processus a commencé par la capture de la géométrie routière à l'aide d'un capteur LIDAR fixe dans la rue. Les données brutes ont été traitées dans CloudCompare pour nettoyer le bruit et aligner les nuages de points avec le modèle CAO de l'intersection. Ce maillage optimisé a été importé dans Unity, où le jumeau numérique a été créé. Pour reproduire l'accident, un script simulant la latence du réseau V2X a été programmé. Dans Unreal Engine 5, la séquence exacte a été visualisée : le capteur LIDAR détectait un piéton et envoyait le signal, mais le véhicule autonome recevait l'ordre de freinage avec un retard de 120 millisecondes, suffisant pour provoquer l'impact. MATLAB a analysé les signaux temporels du jumeau, comparant l'horodatage du LIDAR avec celui de l'ECU du véhicule, confirmant le décalage critique.
Leçons pour des infrastructures intelligentes plus sûres 🛠️
Le jumeau numérique a démontré que la panne ne venait ni du capteur ni du véhicule, mais du protocole de synchronisation V2X. La latence de 120 ms, bien que faible, s'est avérée fatale dans un environnement à grande vitesse. La solution ne réside pas seulement dans un matériel plus rapide, mais dans la mise en œuvre d'un tampon de sécurité temporel dans le logiciel du feu, validé par des simulations sur jumeaux numériques. Ce cas souligne que la fiabilité d'une ville intelligente dépend de la synchronisation parfaite entre ses jumeaux virtuels et ses systèmes physiques.
En tant qu'ingénieur, quelle latence spécifique en millisecondes entre le feu V2X et le nuage du jumeau numérique a causé le décalage fatal dans la réaction du véhicule autonome ?
(PS : Mon jumeau numérique est actuellement en réunion, pendant que je suis ici à modéliser. Donc techniquement, je suis à deux endroits à la fois.)