La fracture d'une aiguille micro-chirurgicale lors d'une opération robotique pose un dilemme technique critique : le matériau a-t-il cédé par fatigue ou la pression excessive du robot était-elle en cause ? Le fragment récupéré est soumis à une analyse forensique par microscopie électronique 3D (ZEISS ZEN) et micro-simulation par éléments finis (Abaqus). Cet article détaille le flux de travail pour déterminer la cause racine de l'effondrement structurel.
Flux de travail forensique : De la micrographie 3D à la simulation de fatigue 🔬
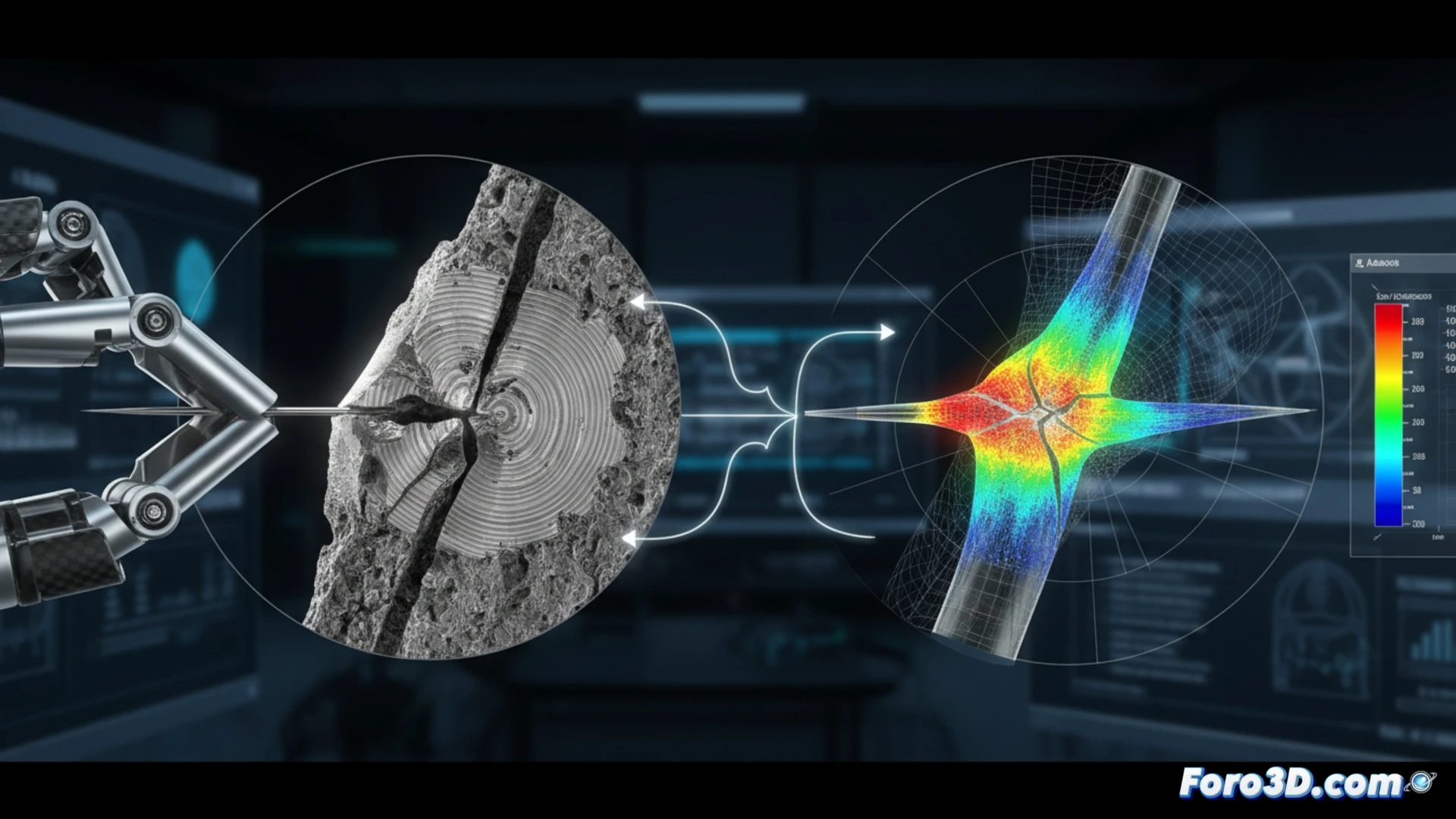
Le processus commence par la capture de la topographie de surface du fragment dans ZEISS ZEN, générant un modèle 3D haute résolution qui révèle les marques de propagation de fissure et les stries de fatigue. Ce modèle est exporté vers Materialise Mimics pour segmenter la géométrie réelle et corriger les artefacts. Ensuite, il est importé dans Abaqus pour un micro-FEA qui simule les charges cycliques typiques de la suture robotique. L'analyse compare deux scénarios : la fatigue accumulée par des cycles répétitifs versus une surcharge ponctuelle dépassant la limite élastique de l'acier inoxydable 316L. La distribution des contraintes de Von Mises à la pointe de l'aiguille détermine si la défaillance coïncide avec la zone de contact contre le tissu osseux.
Le dilemme du retour haptique : Pression contrôlée ou erreur logicielle ? 🤖
La simulation révèle qu'une surcharge ponctuelle génère un motif de fracture fragile avec des bords nets, tandis que la fatigue produit des stries progressives et une déformation plastique localisée. Si le modèle dans Abaqus confirme que la contrainte maximale a dépassé le seuil du matériau uniquement dans des conditions de pression soutenue, la cause pointe vers une défaillance du logiciel de retour haptique. Cette analyse non seulement disculpe le matériau, mais oblige à recalibrer les algorithmes de résistance du robot pour éviter de futurs incidents.
Dans une simulation FEA forensique d'une aiguille chirurgicale fracturée lors d'une opération robotique, comment peut-on discriminer entre une défaillance par fatigue cyclique due à des micro-vibrations non détectées et une défaillance par surcharge ponctuelle générée par la rigidité de l'actionneur robotique ?
(PS : La fatigue des matériaux, c'est comme la vôtre après 10 heures de simulation.)