La récente défaillance d'un robot chirurgical lors d'une opération à distance a sonné l'alarme dans le secteur de l'automatisation. L'incident, où le bistouri a exécuté un mouvement erratique fatal, a pris naissance dans le bras robotique. Une analyse médico-légale par métrologie optique a révélé que la cause n'était pas une erreur logicielle, mais un micro-usure asymétrique des servomoteurs et engrenages, induite par une latence du signal de commande.
Métrologie de précision : numérisation et analyse de fatigue 🔬
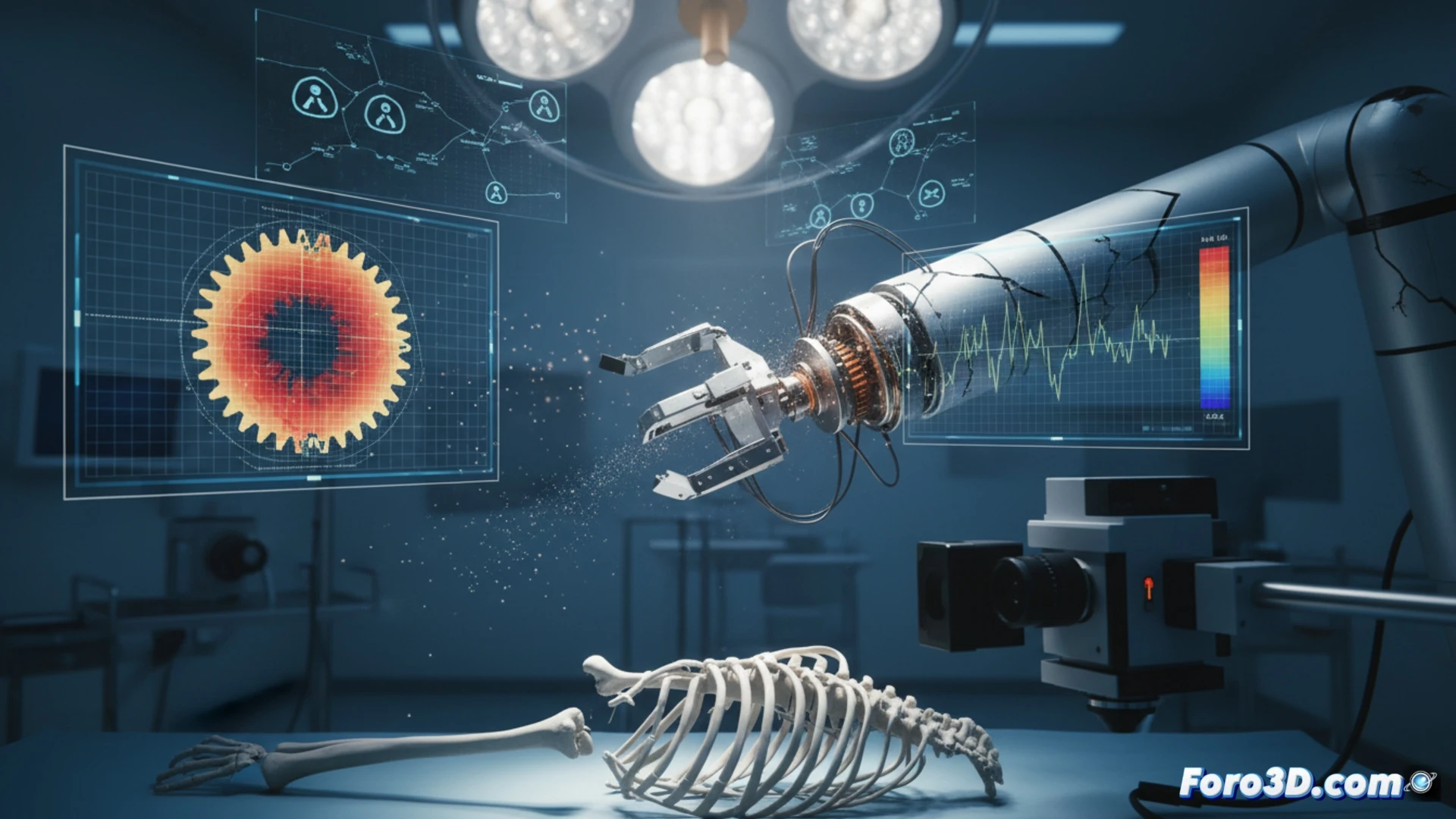
Pour déterminer la cause racine, le scanner GOM ATOS Q a été utilisé pour capturer la géométrie des servos et engrenages du robot. Le logiciel de métrologie a détecté des écarts de quelques microns seulement sur les surfaces de contact, une usure asymétrique impossible à voir à l'œil nu. Ce motif d'usure a été corrélé aux micro-vibrations constantes enregistrées dans MATLAB pendant l'opération. La latence du signal de commande, bien qu'imperceptible pour le chirurgien, a provoqué des oscillations et des surcorrections des servos, générant une fatigue cyclique sur les dents des engrenages en alliage. Des modèles dans SolidWorks ont confirmé que la contrainte accumulée dépassait la limite de fatigue du matériau, entraînant une perte de précision millimétrique.
Leçons pour les jumeaux numériques et le contrôle prédictif ⚙️
Ce cas démontre que la robotique chirurgicale ne dépend pas seulement de la précision du logiciel, mais aussi de l'intégrité mécanique à l'échelle micrométrique. La solution proposée consiste à mettre en œuvre des jumeaux numériques dans Blender et SolidWorks qui simulent l'usure en temps réel, alimentés par des données de latence. Un système de maintenance prédictive, basé sur l'analyse des spectres de vibration de MATLAB, pourrait détecter ces oscillations avant qu'elles ne génèrent une usure critique. La défaillance n'était pas matérielle, mais celle d'une conception de contrôle qui ignorait la fatigue mécanique induite par le réseau.
Comment l'industrie de la robotique chirurgicale peut-elle atténuer le risque de micro-usure des actionneurs causée par la latence du signal lors d'opérations de téléchirurgie à longue distance ?
(PS : Simuler des robots est amusant, jusqu'à ce qu'ils décident de ne pas suivre vos ordres.)