Le récent incident d'usure sur un bras robotique chirurgical relance le débat sur la fatigue des matériaux dans les environnements de haute précision. Contrairement à la robotique industrielle, où une défaillance peut arrêter une ligne de production, en chirurgie assistée, l'usure compromet directement la sécurité du patient. Cet article technique analyse les causes de la détérioration mécanique, l'utilisation de jumeaux numériques pour simuler le stress cyclique et les stratégies de maintenance prédictive basées sur des modèles 3D.
Simulation des points critiques de fatigue via des jumeaux numériques 🔧
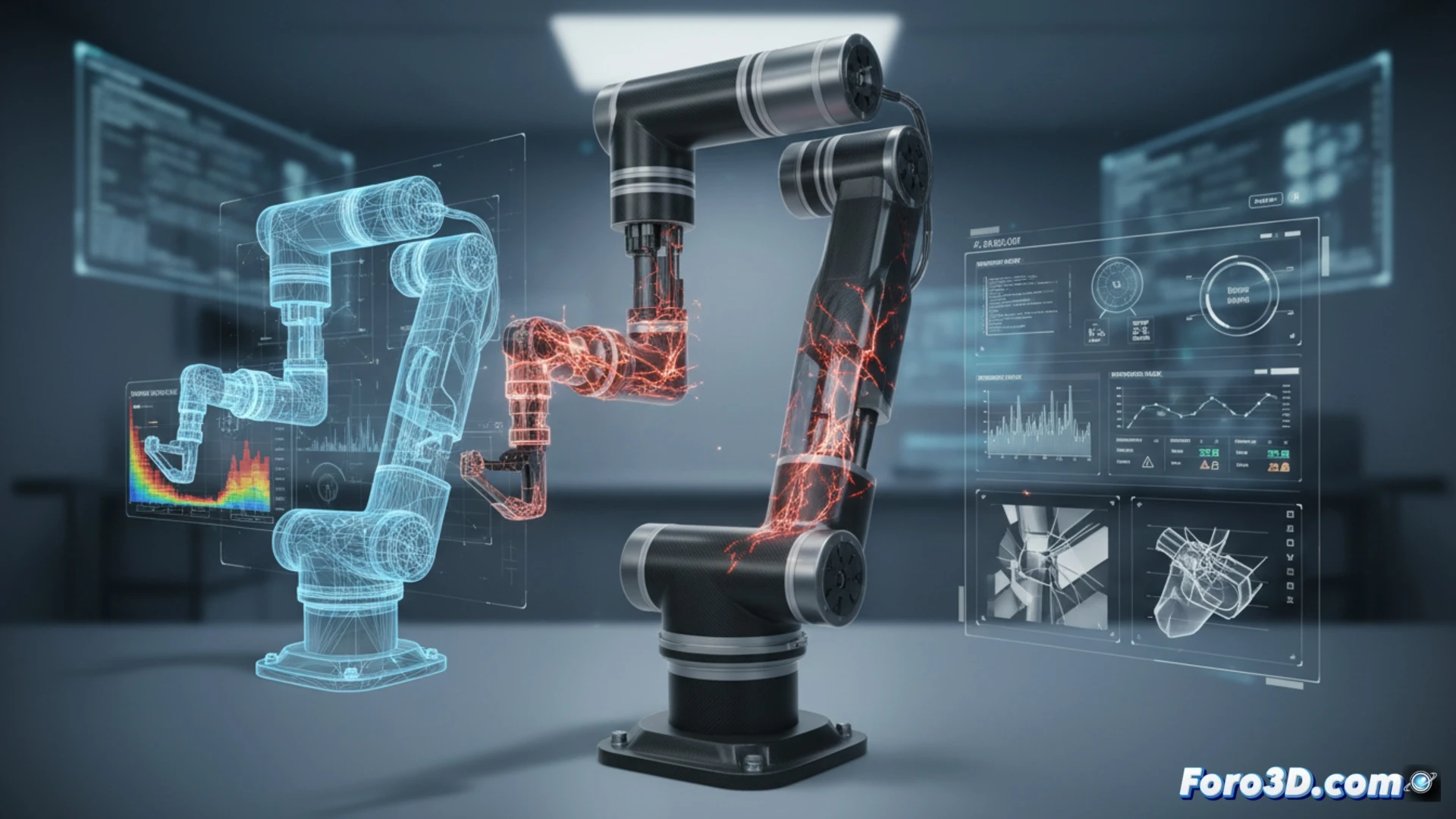
L'usure d'un bras robotique chirurgical se concentre généralement au niveau des articulations à rotule et des réducteurs harmoniques, où le couple de torsion répétitif génère des microfissures. Grâce à des simulations par éléments finis intégrées dans des jumeaux numériques, les ingénieurs peuvent visualiser la distribution des contraintes en temps réel. Par exemple, un modèle 3D du bras Da Vinci permet d'identifier que le coude supporte 40 % de charge de plus que ce qui était estimé dans les conceptions initiales. Cette technique, combinée à des capteurs de vibration, permet de prédire les défaillances plusieurs semaines à l'avance, en ajustant les cycles de lubrification ou le remplacement des composants critiques avant une intervention réelle.
Implications en matière de sécurité et le dilemme de la maintenance réactive ⚠️
La principale leçon de cet incident est que la robotique médicale ne peut pas se permettre une approche réactive. Chaque micro-usure non détectée peut se traduire par un écart millimétrique lors d'une suture. L'utilisation de simulations 3D optimise non seulement les coûts de maintenance, mais redéfinit également les protocoles de certification. Exiger que chaque bras chirurgical dispose d'un jumeau numérique mis à jour avec des données de fatigue devrait être une norme, et non une option. La technologie pour prédire la défaillance existe ; le défi est de la mettre en œuvre avant que l'usure ne devienne un risque évitable.
Compte tenu du récent incident d'usure sur un bras robotique chirurgical, quelles méthodologies de simulation prédictive ou capteurs de surveillance en temps réel pourraient être mis en œuvre pour anticiper la fatigue mécanique des articulations avant qu'elle ne compromette la sécurité du patient ?
(PS : Simuler des robots est amusant, jusqu'à ce qu'ils décident de ne pas suivre vos ordres.)