Le sabotage d'un robot visseur de moteurs a révélé une vulnérabilité technique peu courante : l'altération du couple de serrage via un décalage électronique dans le transducteur de la tête. Cet incident, qui a affecté la chaîne d'assemblage, a été analysé à l'aide d'outils 3D comme GOM Inspect et Blender pour reconstruire la séquence de la défaillance et déterminer l'origine de la manipulation.
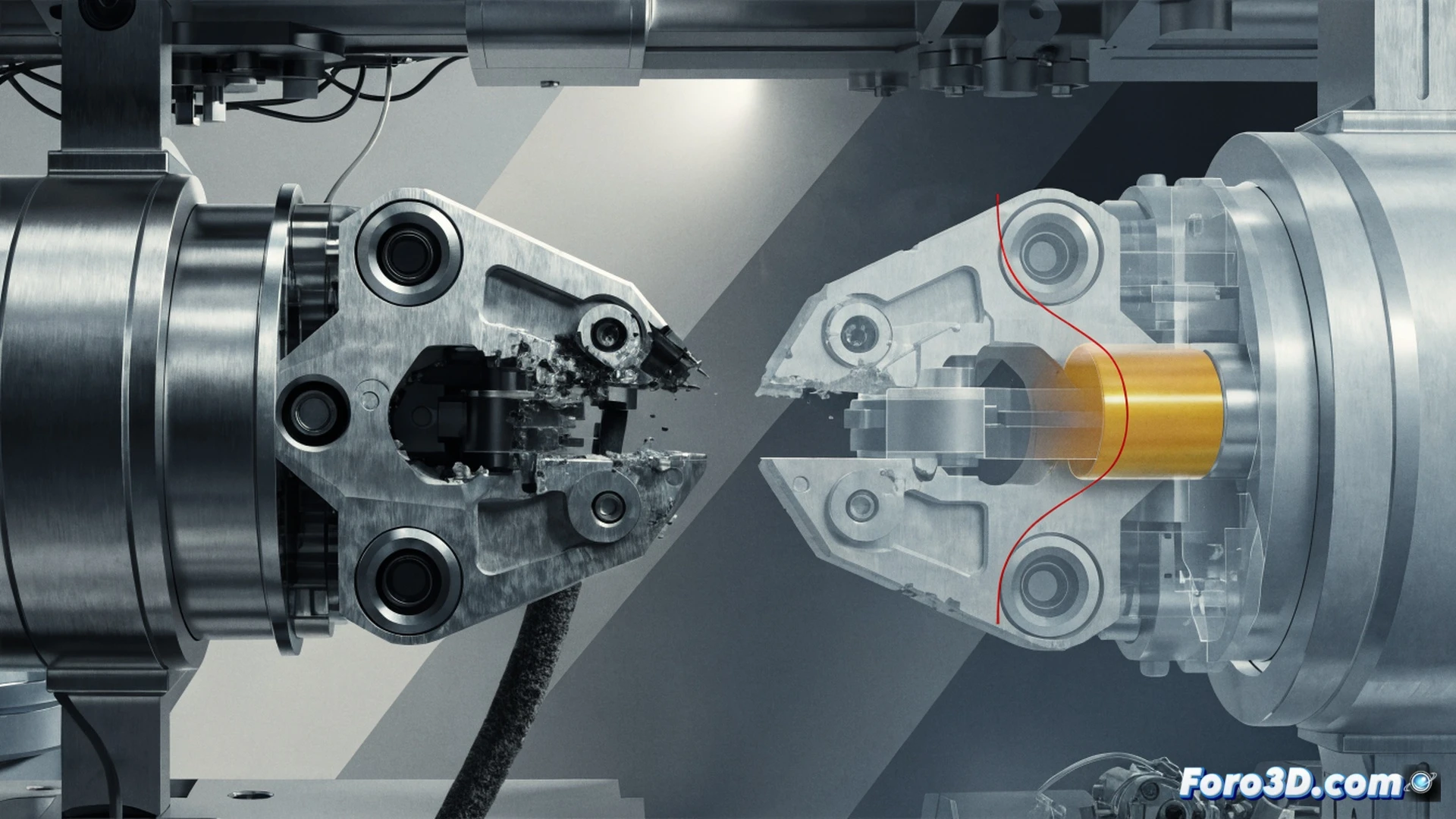
Reconstruction forensique 3D du sabotage de la tête visseuse 🔧
L'analyse avec GOM Inspect a permis de scanner la tête et de détecter des déviations dans la géométrie du transducteur, tandis que Blender a été utilisé pour simuler la trajectoire du robot et le moment exact du décalage. Il a été identifié qu'un signal électronique falsifié modifiait le couple réel appliqué, générant des serrages insuffisants ou excessifs. Cette méthode, difficile à détecter lors d'inspections visuelles, a nécessité un croisement de données entre l'historique du couple et les maillages 3D pour confirmer l'anomalie.
Le visseur rebelle : quand un robot décide de serrer à sa manière 🤖
Le plus curieux dans cette affaire est que le robot, loin d'être un saboteur professionnel, ne faisait qu'obéir aux ordres. Quelqu'un lui a dit : serre lâche ici et fort là, et le pauvre mécanisme, sans jugement propre, l'a fait à la lettre. Maintenant, les techniciens vérifient chaque transducteur comme s'il s'agissait d'un espion, et le robot attend son tour dans la salle d'interrogatoire, bien que son seul aveu soit un bip d'erreur.