Pneupard : un robot quadrupède pneumatique qui imite un guépard
À l'Université d'Osaka, une équipe scientifique développe un robot quadrupède nommé Pneupard, dont le système de propulsion repose exclusivement sur de l'air comprimé. Ce projet vise à répliquer la mécanique des muscles d'un guépard, l'animal terrestre le plus rapide. En remplaçant les moteurs électriques par des actionneurs pneumatiques, le robot acquiert une flexibilité naturelle qui lui permet de se déplacer de manière dynamique et de s'adapter au terrain. 🐆
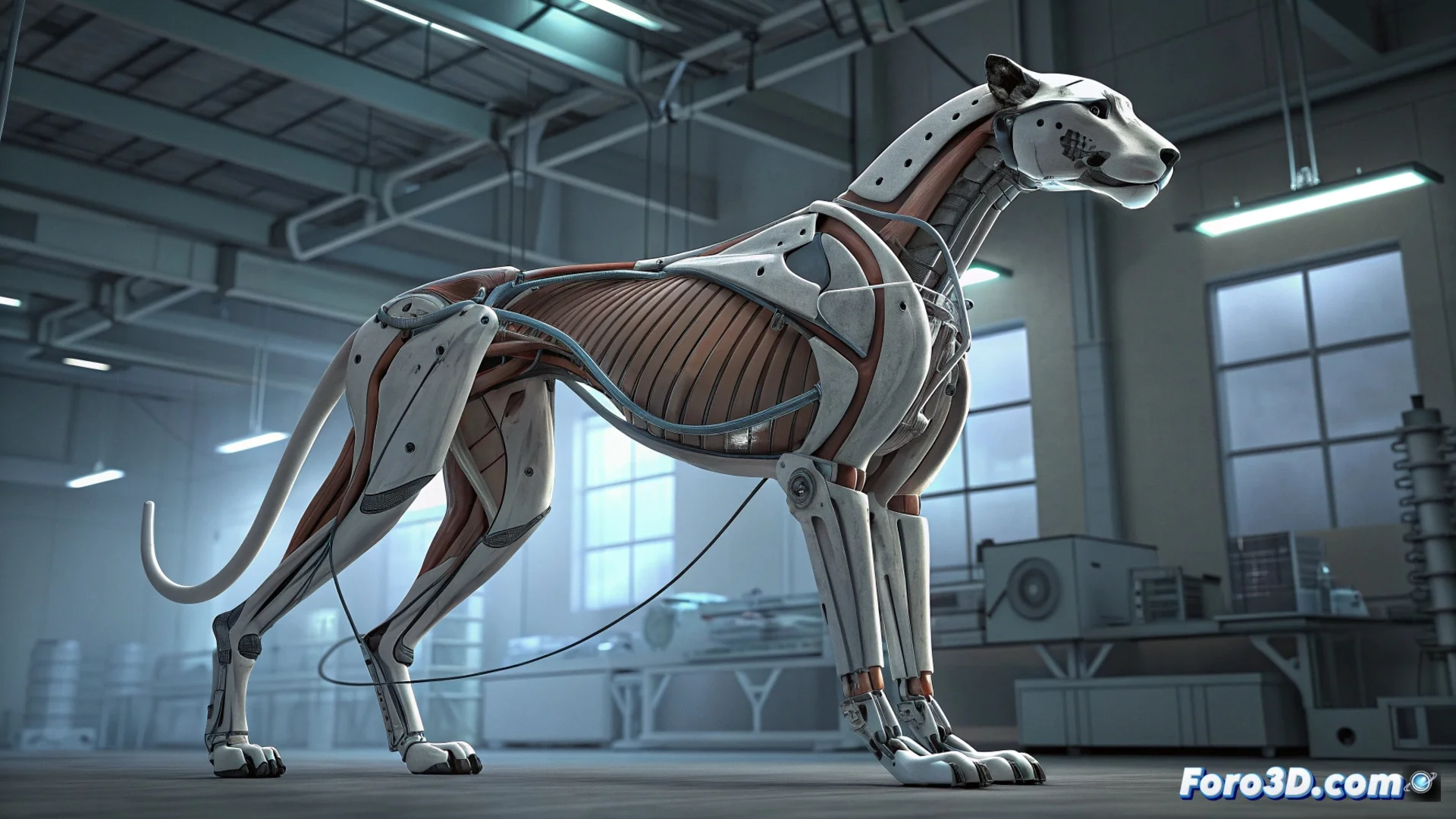
La pneumatique définit sa mobilité et sa flexibilité
Le système pneumatique est au cœur des capacités de Pneupard. Les actionneurs, alimentés par de l'air sous pression, se dilatent et se contractent pour simuler la contraction musculaire réelle. Cela produit une locomotion qui n'est pas seulement potentiellement rapide, mais aussi fluide et dotée d'une élasticité inhérente. La compliance ou adaptabilité de ces composants permet au robot d'interagir avec son environnement de manière plus sûre, car il peut amortir les impacts et moduler sa force lors des déplacements. Cette approche représente une alternative prometteuse pour concevoir des robots devant opérer sur des terrains irréguliers ou changeants.
Avantages clés du système pneumatique :- Offre une flexibilité intrinsèque qui imite les tissus biologiques.
- Permet des mouvements rapides et une absorption naturelle des impacts.
- Facilite une interaction plus sûre avec des environnements imprévisibles.
L'élégance du mouvement naturel nécessite plus que d'imiter la forme ; elle doit répliquer la physique des muscles.
Un laboratoire physique pour comprendre comment se déplacent les animaux
Le but principal de Pneupard n'est pas commercial, mais de servir d'outil de recherche avancé. Les chercheurs l'utilisent comme un modèle physique tangible pour tester des théories sur la façon dont les animaux coordonnent leurs membres et maintiennent l'équilibre. En analysant les données de ses schémas de marche, on peut mieux comprendre l'efficacité énergétique, la stabilité et les rythmes de la locomotion dans la nature.
Applications potentielles de cette recherche :- Améliorer la conception de robots marcheurs pour le sauvetage ou l'exploration.
- Inspirer le développement de prothèses robotiques plus naturelles et adaptatives.
- Créer de nouveaux systèmes de rééducation physique basés sur des mouvements biologiques.
Le chemin à parcourir entre l'imitation et l'égalisation
Bien que son inspiration soit le rapide guépard, la vitesse actuelle de Pneupard ressemble plus à une promenade tranquille qu'à une course. Ce détail souligne un principe fondamental : émuler la sophistication et l'efficacité des systèmes biologiques est un défi d'ingénierie complexe. Pneupard n'est pas la destination finale, mais une étape cruciale pour boucler le cycle entre la biologie et la robotique, démontrant que parfois la solution la plus élégante peut être propulsée par de l'air comprimé tout simple. 🤖