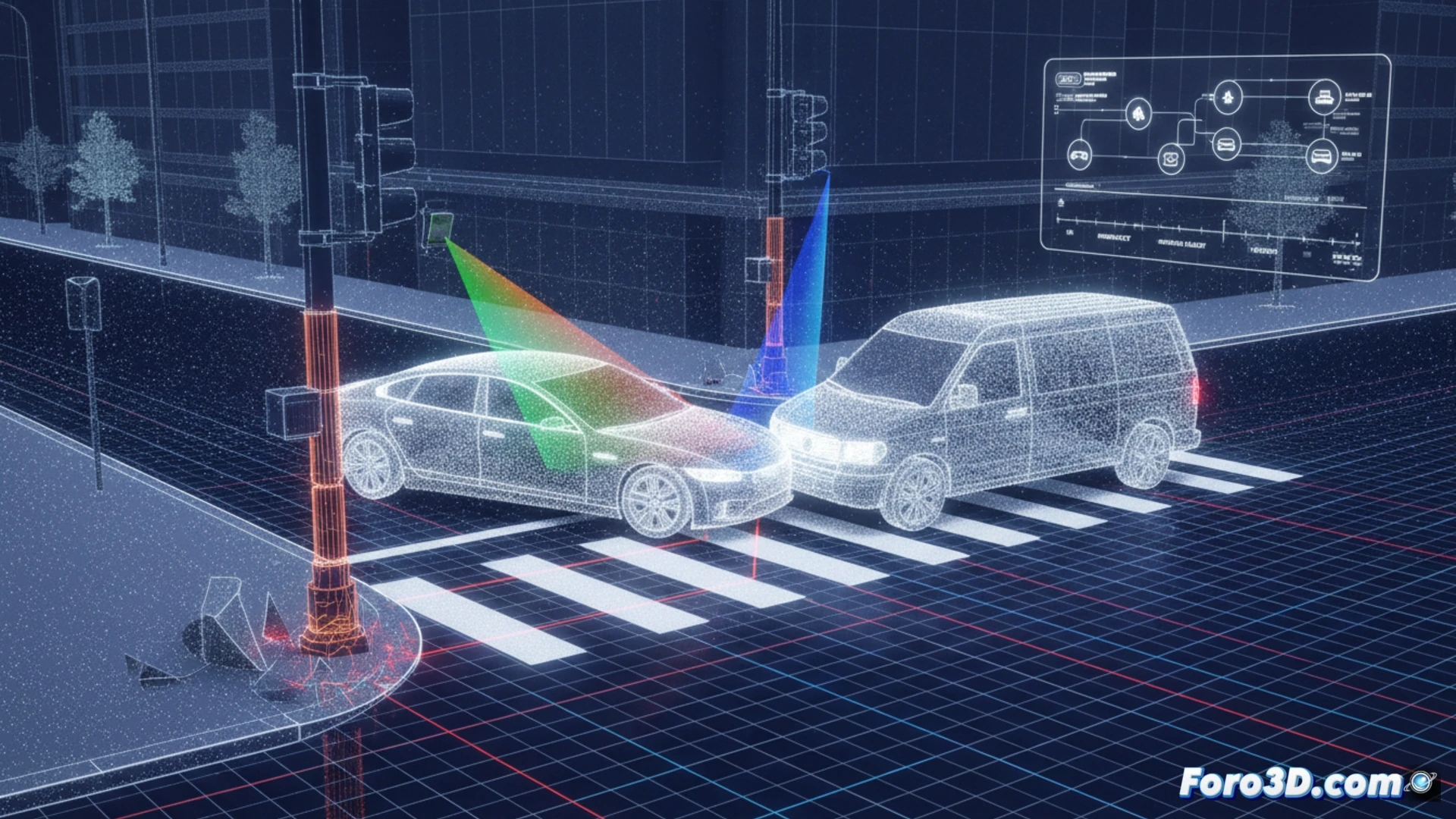
Last month, a smart intersection equipped with V2X infrastructure LiDAR sensors was the scene of an accident between two autonomous vehicles. Authorities, puzzled by the apparent failure of the control system, turned to a 3D forensic pipeline to clarify the events. The main hypothesis pointed to a calibration error induced by thermal expansion of the mounting pole, a failure difficult to detect in real time but critical to the safety of these environments.
Technical workflow: From point cloud to simulation in UE5 🛠️
The process began with the extraction of raw point clouds recorded by the intersection's LiDAR during the seconds prior to impact. The first critical step was importing this data into CloudCompare, where a fine alignment (ICP registration) of the static point clouds (poles, curbs) against the CAD model of the civil works was performed. This comparison revealed a progressive shift of the cloud by 4.2 centimeters on the Z axis, coinciding with the peak ambient temperature. After confirming the calibration error, the corrected trajectory of the vehicles was exported to MATLAB for calculating the impact kinematics. Finally, the cleaned data and vehicle meshes were integrated into Unreal Engine 5, where the scene was recreated with HDR lighting and realistic physics to visualize the exact point of collision and the failed evasive maneuver.
Lessons for LiDAR infrastructure validation 📐
This case underscores the need to implement dynamic calibration procedures in V2X sensors. Pole expansion, a predictable physical phenomenon, can skew an autonomous vehicle's perception without onboard systems detecting it. The combination of tools like CloudCompare for geometric analysis and Unreal Engine 5 for visual simulation is consolidating as the de facto standard in connected mobility accident investigation. It is not just about reconstructing an accident, but about understanding how the physical environment and digital infrastructure interact to fail or save lives.
Is it possible to detect a LiDAR calibration error at a V2X intersection by analyzing reflectance patterns of static objects before an accident like the one described occurs?
(PS: In scene analysis, every scale witness is a small anonymous hero.)