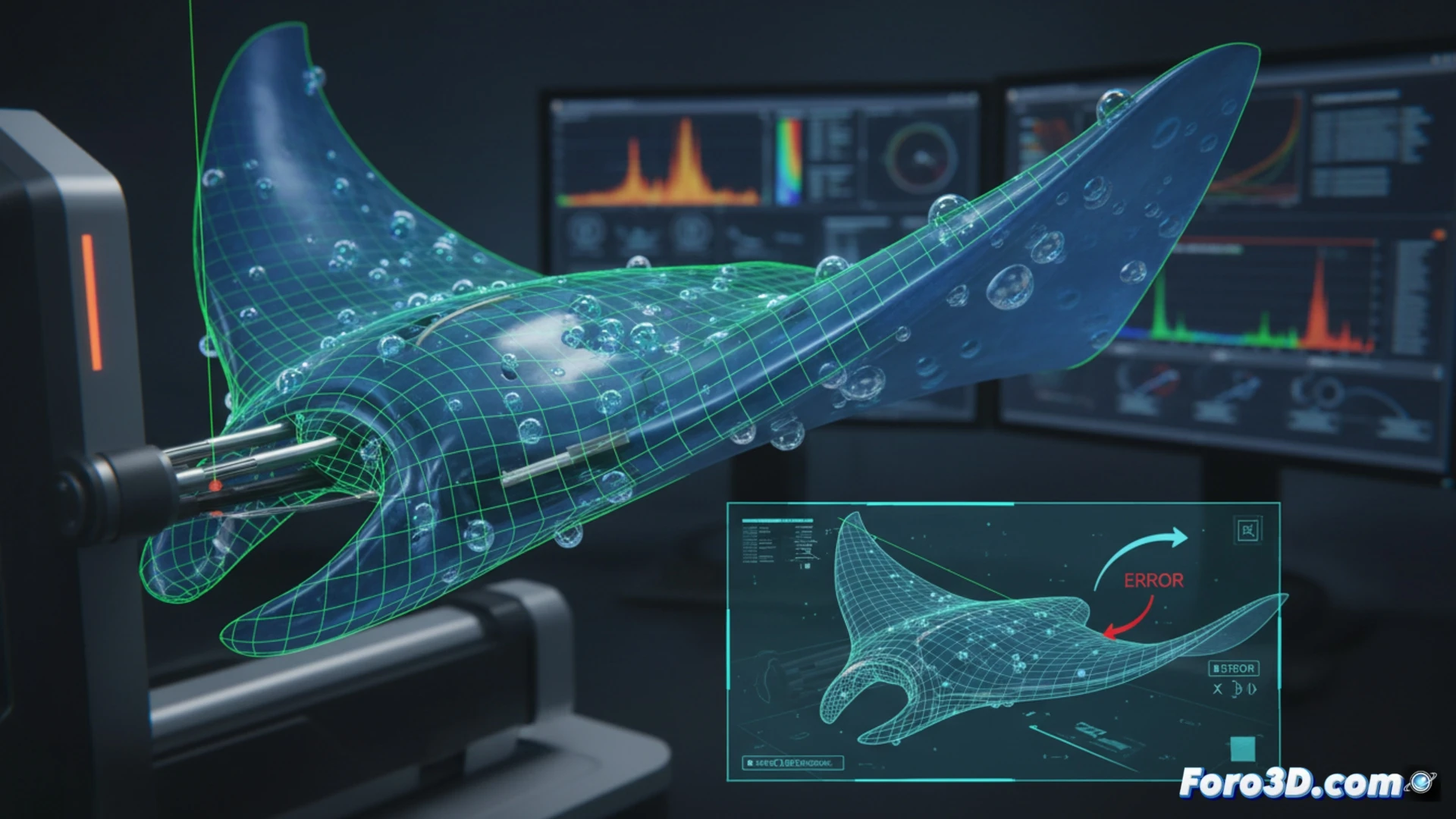
A highly advanced underwater robotic explorer, designed to mimic the undulating motion of a manta ray, suffered a total loss of control during a tank test. The failure, which prevented the prototype from performing asymmetric turns, has been analyzed through high-precision 3D forensic analysis. The investigation focuses on the silicone fins, manufactured using vacuum casting, where trapped air during the process is suspected to have altered the flexibility required for navigation.
Volumetric Diagnosis with VGSTUDIO MAX and Ansys FSI 🛠️
The forensic team used VGSTUDIO MAX to perform a computed tomography scan of the silicone fins, revealing micro air bubbles irregularly distributed within the material. These inclusions, invisible to the naked eye, generated zones of localized stiffness. To evaluate the dynamic impact, a Fluid-Structure Interaction (FSI) simulation was executed in Ansys. The digital model, recreated in Blender for scientific visualization, demonstrated that the asymmetry in flexibility prevented the difference in thrust between the left and right wing, nullifying the robot's turning ability.
The lesson from natural biomechanics 🌊
This case underscores the importance of material homogeneity in soft robotics. In nature, the real manta ray possesses flexible cartilage without internal imperfections, allowing precise flow control. The 3D forensic analysis not only resolved the technical failure but also highlighted how a vacuum casting manufacturing defect can disrupt biomechanical harmony. The FSI simulation thus consolidates itself as an indispensable tool for validating robotic prototypes before their deployment in real marine environments.
As an expert in scientific visualization, what volumetric rendering and CT data segmentation techniques would you recommend to reveal the nucleation and propagation of micro bubbles within the matrix of a flexible robotic actuator during its fatigue cycle?
(PS: fluid physics for simulating the ocean is like the sea: unpredictable and you always run out of RAM)