The Aiper Scuba S1 Pro represents a leap in domestic service robotics, eliminating dependence on hoses and external electrical connections. This wireless pool cleaning robot integrates a proprietary navigation system called WavePath 2.0, which allows it to perform a comprehensive cleaning of the pool basin. Its energy autonomy and ability to climb walls and attack the waterline make it an ideal case study for analyzing how 3D automation solves complex maintenance problems.
Sensor Architecture and WavePath 2.0 Algorithm 🤖
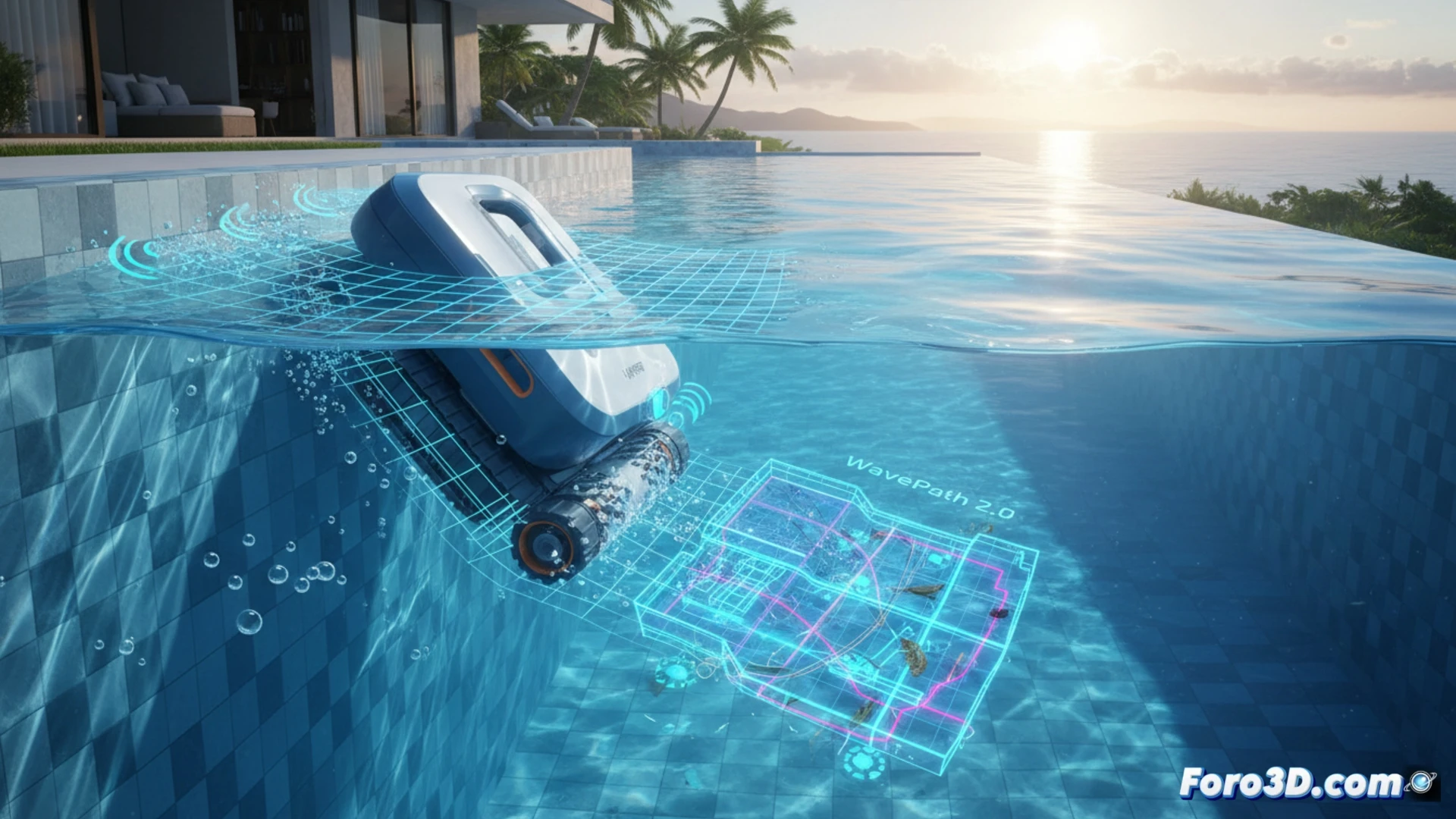
The key to the Scuba S1 Pro's performance lies in its volumetric mapping algorithm. Unlike robots that rely on contact sensors or simple gyroscopes, the WavePath 2.0 system uses a combination of three-axis accelerometers and differential pressure sensors to build a three-dimensional map of the environment. The robot does not simply bounce around randomly; it calculates spiral and parallel trajectories to cover the floor, walls, and waterline. When it detects a change in angle via the tilt sensor, it activates the traction motors to scale the vertical wall, using the suction generated by its dual-impeller pump to adhere to the surface. Once at the waterline, it reduces speed and extends its side brushes to scrape off accumulated debris, ensuring 100% of the perimeter is covered without unnecessary overlaps.
3D Automation vs. Traditional Systems 🏊
Compared to corded pool robots or random models, the S1 Pro demonstrates superior energy and time efficiency. Traditional systems often waste time cleaning already covered areas or get trapped by obstacles like stairs. The 3D automation of the Scuba S1 Pro, by mapping the entire water volume, optimizes the return path to the charging station and prioritizes areas with the highest dirt accumulation. This not only reduces the cleaning cycle time by an estimated 30%, but also minimizes mechanical wear by avoiding constant collisions. This robot demonstrates that true innovation in domestic robotics lies not just in suction power, but in the intelligence to move efficiently within a complex three-dimensional environment like a pool.
How does the implementation of autonomous navigation algorithms in a pool robot like the Aiper Scuba S1 Pro solve the main challenges of energy efficiency and complete coverage in unstructured aquatic environments?
(PS: Simulating robots is fun, until they decide not to follow your orders.)