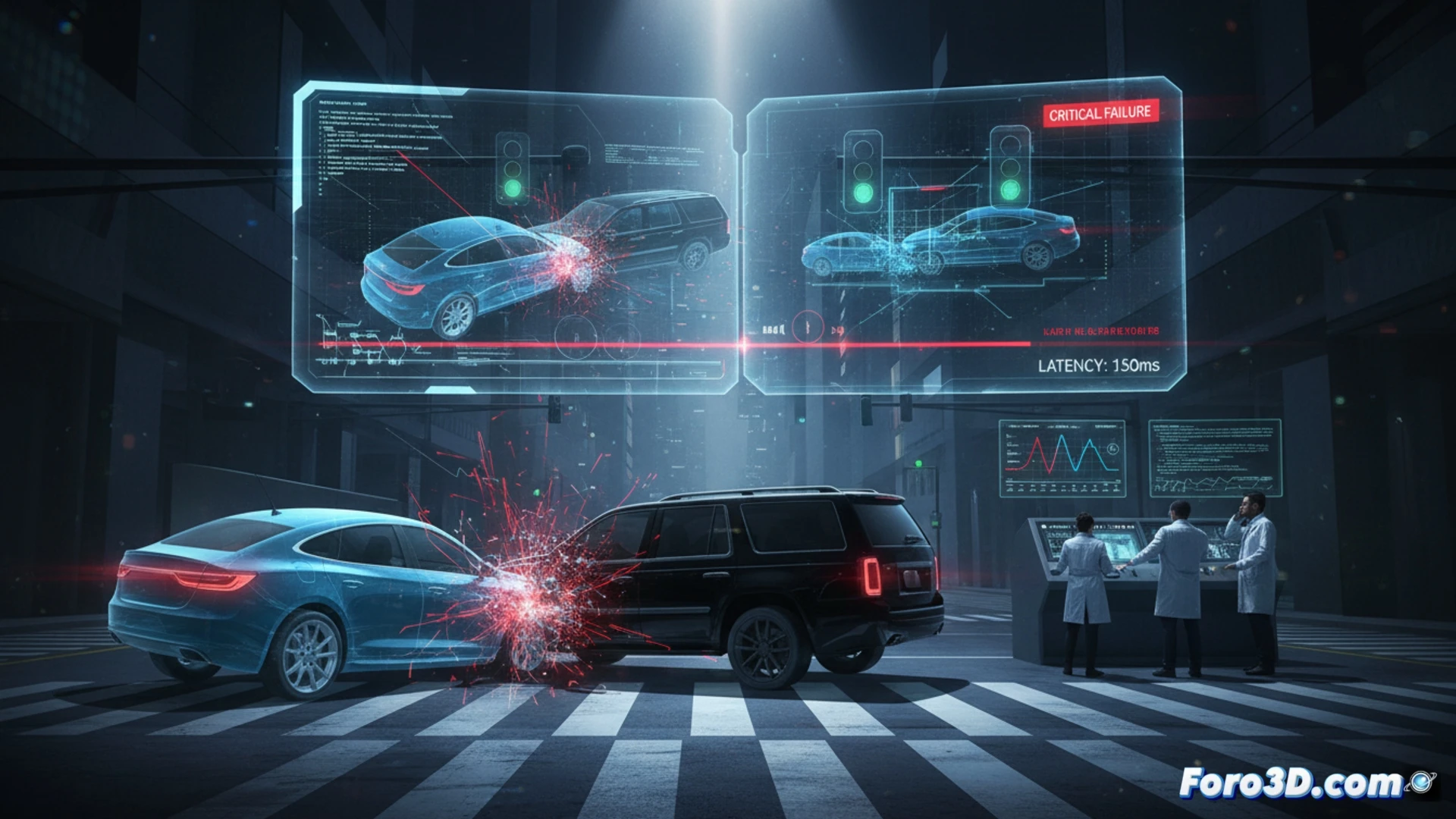
An accident at a smart intersection occurred when the V2X traffic light indicated a clear path, but the autonomous vehicle did not react in time. To clarify the failure, an exact digital twin of the intersection was built. This model replicated the real environment using street LIDAR data, allowing engineers to isolate the critical variable: the latency between sensor detection and vehicle response. The goal was to find the time lag that turned a green light into a deadly trap.
Importing LIDAR point clouds and latency simulation in Unity 🚦
The process began with capturing the road geometry using a fixed LIDAR sensor on the street. The raw data was processed in CloudCompare to clean up noise and align the point clouds with the intersection's CAD model. This optimized mesh was imported into Unity, where the digital twin was created. To replicate the accident, a script was programmed to simulate the V2X network latency. In Unreal Engine 5, the exact sequence was visualized: the LIDAR sensor detected a pedestrian and sent the signal, but the autonomous vehicle received the braking command with a delay of 120 milliseconds, enough to cause the impact. MATLAB analyzed the twin's time signals, comparing the LIDAR timestamp with the vehicle's ECU timestamp, confirming the critical lag.
Lessons for safer smart infrastructure 🛠️
The digital twin demonstrated that the failure was not in the sensor or the vehicle, but in the V2X synchronization protocol. The 120 ms latency, although small, proved fatal in a high-speed environment. The solution is not just faster hardware, but implementing a temporary safety buffer in the traffic light software, validated through simulations in digital twins. This case underscores that the reliability of a smart city depends on perfect synchronization between its virtual twins and its physical systems.
As an engineer, what specific latency in milliseconds between the V2X traffic light and the digital twin cloud caused the fatal lag in the autonomous vehicle's reaction?
(PS: My digital twin is right now in a meeting, while I'm here modeling. So technically, I'm in two places at once.)