The fracture of a micro-surgical needle during a robotic operation poses a critical technical dilemma: did the material fail due to fatigue, or was it excessive robot pressure? The recovered fragment undergoes forensic analysis using 3D electron microscopy (ZEISS ZEN) and micro-finite element simulation (Abaqus). This article breaks down the workflow to determine the root cause of the structural collapse.
Forensic workflow: From 3D micrography to fatigue simulation 🔬
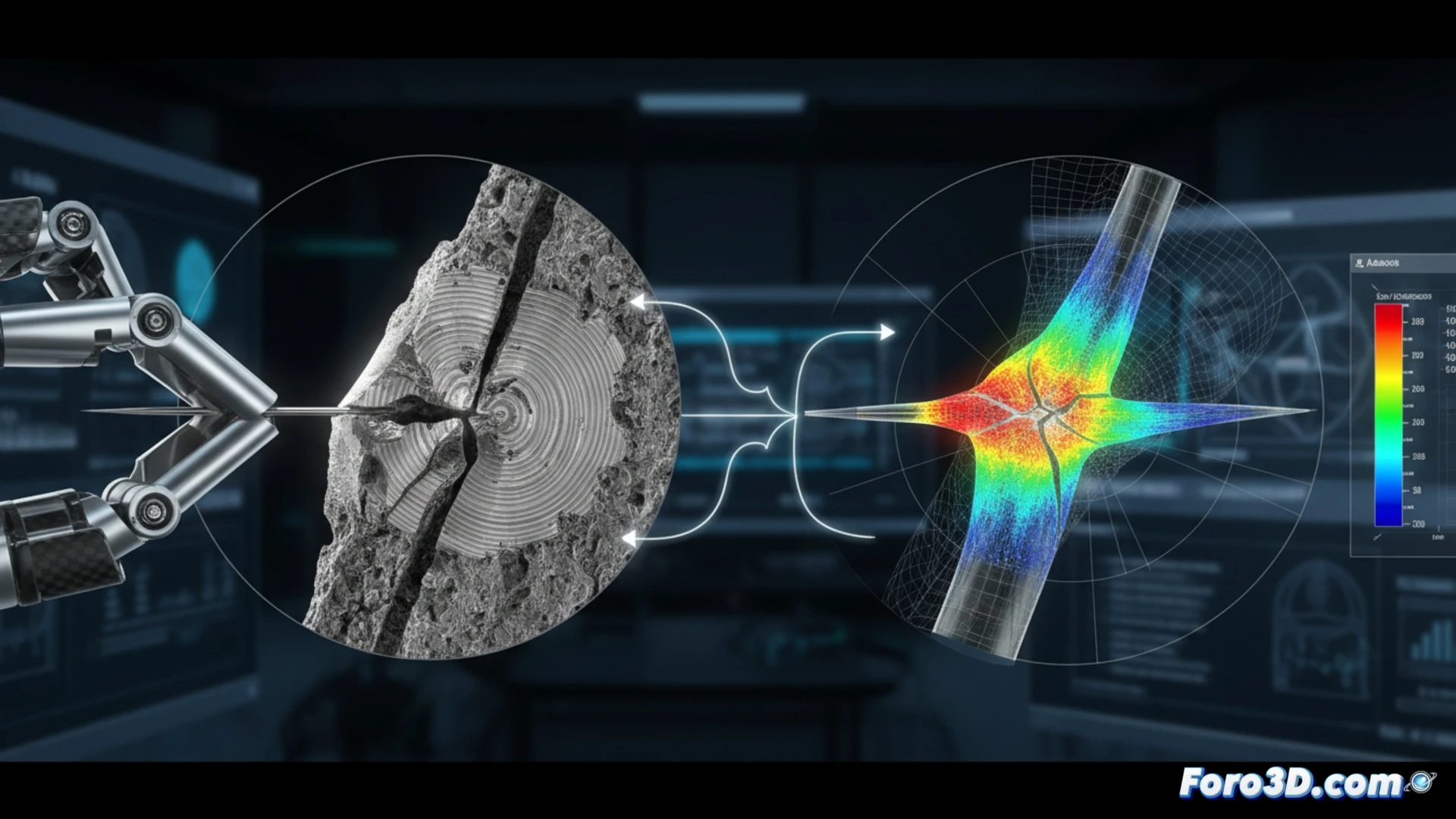
The process begins with capturing the surface topography of the fragment in ZEISS ZEN, generating a high-resolution 3D model that reveals crack propagation marks and fatigue striations. This model is exported to Materialise Mimics to segment the actual geometry and correct artifacts. Subsequently, it is imported into Abaqus for a micro-FEA that simulates the typical cyclic loads of robotic suturing. The analysis compares two scenarios: accumulated fatigue from repetitive cycles versus a single overload exceeding the yield strength of 316L stainless steel. The Von Mises stress distribution at the needle tip determines whether the failure coincides with the contact zone against bone tissue.
The haptic feedback dilemma: controlled pressure or software error? 🤖
The simulation reveals that a single overload generates a brittle fracture pattern with clean edges, while fatigue produces progressive striations and localized plastic deformation. If the Abaqus model confirms that the maximum stress exceeded the material threshold only under sustained pressure conditions, the cause points to a failure in the haptic feedback software. This analysis not only exonerates the material but also forces a recalibration of the robot's resistance algorithms to prevent future incidents.
In a forensic FEA simulation of a fractured surgical needle during a robotic operation, how can one discriminate between a cyclic fatigue failure due to undetected micro-vibrations and a single overload failure generated by the stiffness of the robotic actuator?
(PS: Material fatigue is like yours after 10 hours of simulation.)