The recent failure of a surgical robot during a remote operation has raised alarms in the automation sector. The incident, where the scalpel executed a fatal erratic movement, originated in the robotic arm. A forensic analysis using optical metrology revealed that the cause was not a software error, but asymmetric micro-wear in the servomotors and gears, induced by signal control latency.
Precision metrology: scanning and fatigue analysis 🔬
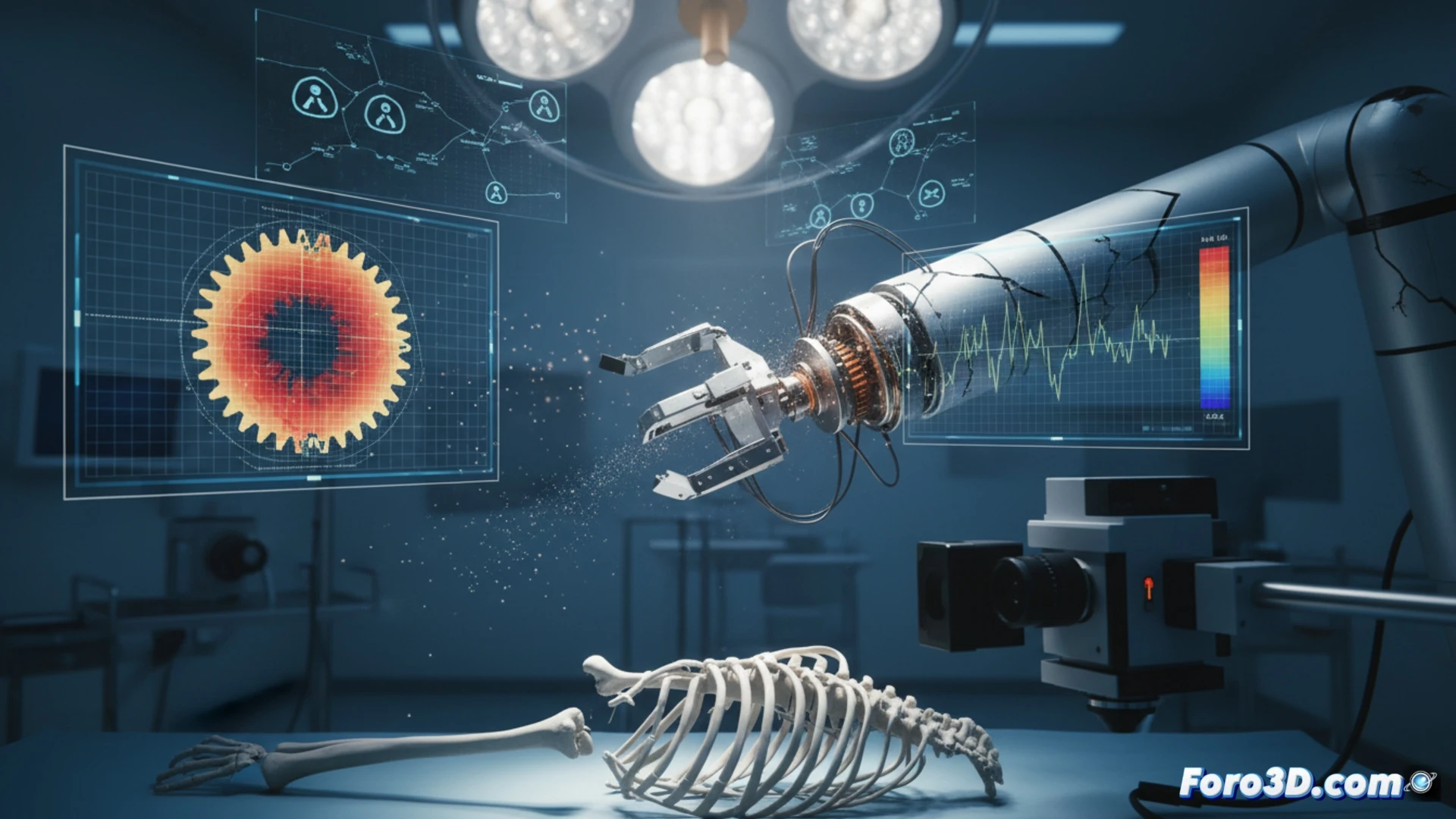
To determine the root cause, the GOM ATOS Q scanner was used to capture the geometry of the robot's servos and gears. The metrology software detected deviations of just a few microns on the contact surfaces, an asymmetric wear pattern impossible to see with the naked eye. This wear pattern correlated with the constant micro-vibrations recorded in MATLAB during the operation. The signal control latency, although imperceptible to the surgeon, caused the servos to oscillate and overcorrect, generating cyclic fatigue in the teeth of the alloy gears. Models in SolidWorks confirmed that the accumulated stress exceeded the material's fatigue limit, causing a loss of millimeter precision.
Lessons for digital twins and predictive control ⚙️
This case demonstrates that surgical robotics depends not only on software precision, but also on mechanical integrity at the micrometer scale. The proposed solution involves implementing digital twins in Blender and SolidWorks that simulate wear in real time, fed by latency data. A predictive maintenance system, based on the analysis of vibration spectra from MATLAB, could detect these oscillations before they generate critical wear. The failure was not of the hardware, but of a control design that ignored network-induced mechanical fatigue.
How can the surgical robotics industry mitigate the risk of micro-wear in actuators caused by signal latency in long-distance telesurgery operations?
(PS: Simulating robots is fun, until they decide not to follow your orders.)