The recent wear incident in a surgical robotic arm reopens the debate on material fatigue in high-precision environments. Unlike industrial robotics, where a failure can halt a production line, in assisted surgery, wear directly compromises patient safety. This technical article analyzes the causes of mechanical deterioration, the use of digital twins to simulate cyclic stress, and predictive maintenance strategies based on 3D models.
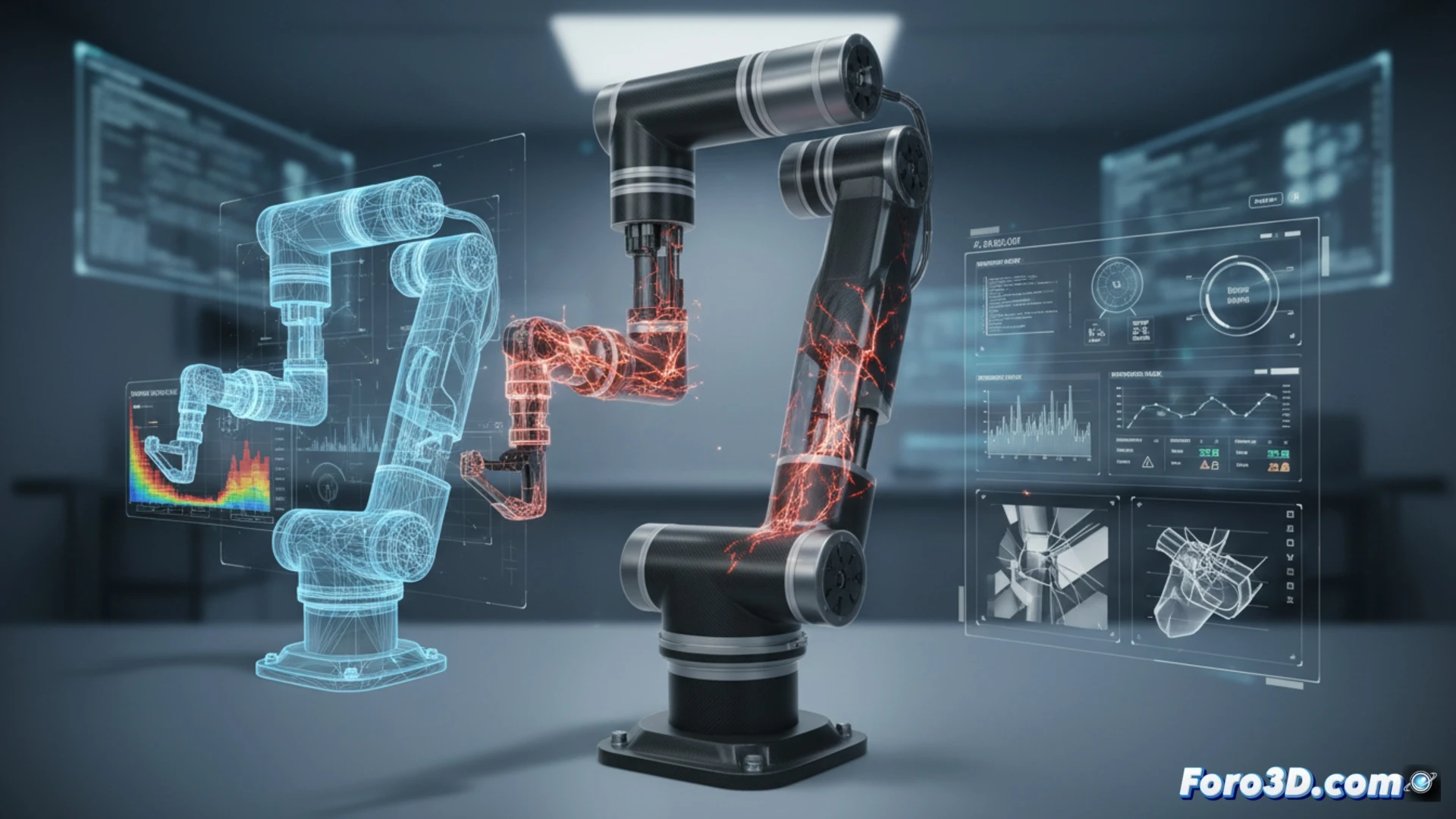
Simulation of critical fatigue points using digital twins 🔧
Wear in a surgical robotic arm typically concentrates in the ball joints and harmonic drives, where repetitive torque generates microcracks. Through finite element simulations integrated into digital twins, engineers can visualize stress distribution in real time. For example, a 3D model of the Da Vinci arm allows identifying that the elbow supports 40% more load than estimated in initial designs. This technique, combined with vibration sensors, enables predicting failures weeks in advance, adjusting lubrication cycles or replacing critical components before an actual intervention.
Safety implications and the dilemma of reactive maintenance ⚠️
The main lesson from this incident is that medical robotics cannot afford a reactive approach. Every undetected micro-wear can translate into a millimeter deviation during a suture. The use of 3D simulations not only optimizes maintenance costs but also redefines certification protocols. Requiring each surgical arm to have a digital twin updated with fatigue data should be a standard, not an option. The technology to predict failure exists; the challenge is implementing it before wear becomes an avoidable risk.
Considering the recent wear incident in a surgical robotic arm, what predictive simulation methodologies or real-time monitoring sensors could be implemented to anticipate mechanical fatigue in the joints before it compromises patient safety?
(PS: Simulating robots is fun, until they decide not to follow your orders.)