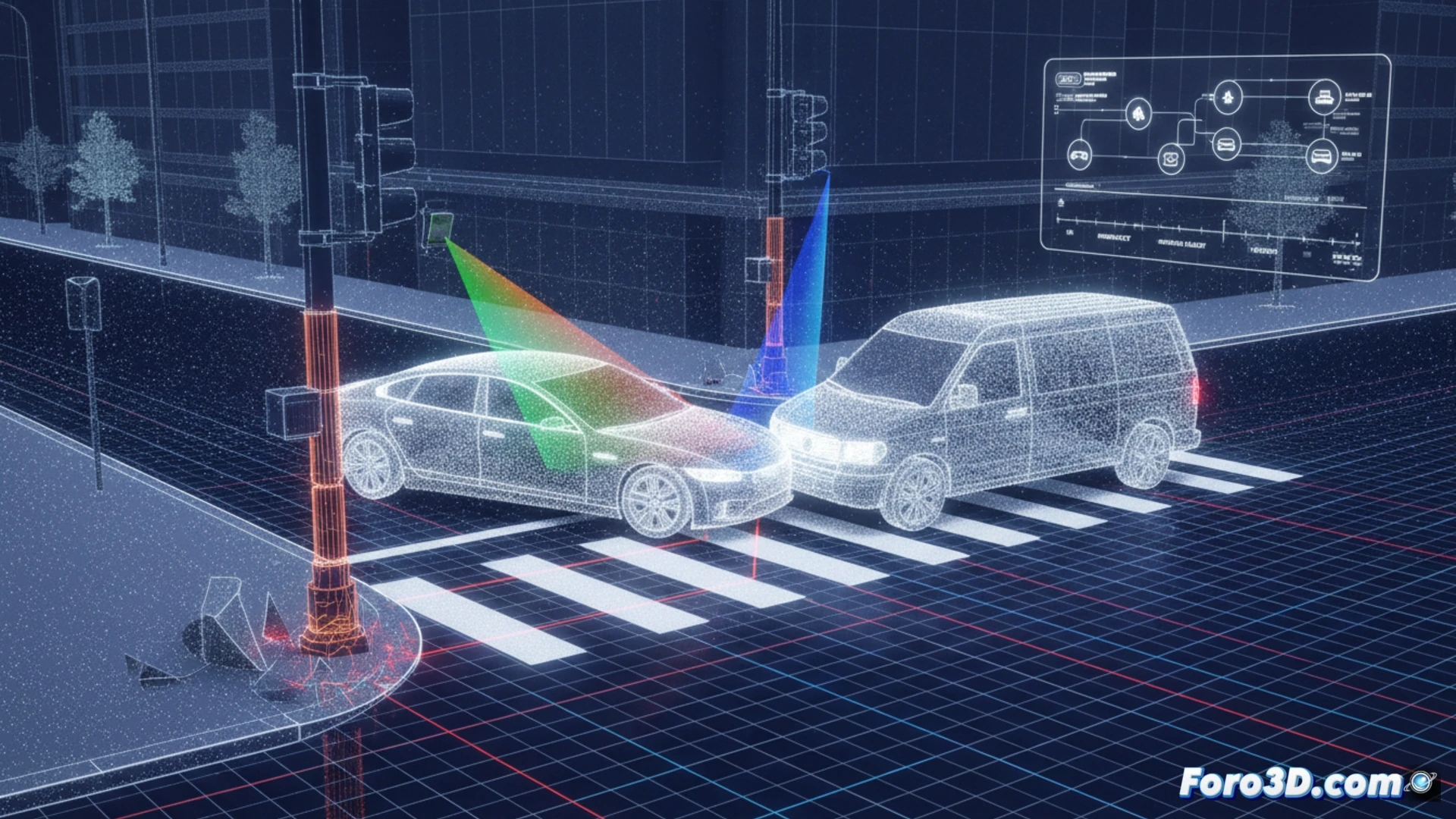
Im vergangenen Monat ereignete sich an einer intelligenten Kreuzung, die mit V2X-Infrastruktur-LiDAR-Sensoren ausgestattet war, ein Unfall zwischen zwei autonomen Fahrzeugen. Die Behörden, ratlos über den offensichtlichen Fehler des Kontrollsystems, griffen auf eine 3D-forensische Pipeline zurück, um die Fakten zu klären. Die Haupthypothese deutete auf einen durch die thermische Ausdehnung des Montagepfostens verursachten Kalibrierungsfehler hin, einen Fehler, der in Echtzeit schwer zu erkennen, aber für die Sicherheit dieser Umgebungen kritisch ist.
Technischer Arbeitsablauf: Von der Punktwolke zur Simulation in UE5 🛠️
Der Prozess begann mit der Extraktion der rohen Punktwolken, die vom LiDAR der Kreuzung in den Sekunden vor dem Aufprall aufgezeichnet wurden. Der erste kritische Schritt war der Import dieser Daten in CloudCompare, wo eine Feinausrichtung (ICP-Registrierung) der statischen Punktwolken (Pfosten, Bordsteine) gegen das CAD-Modell des Bauwerks durchgeführt wurde. Dieser Vergleich zeigte eine fortschreitende Verschiebung der Wolke um 4,2 Zentimeter auf der Z-Achse, die mit der Spitzenumgebungstemperatur zusammenfiel. Nach Bestätigung des Kalibrierungsfehlers wurde die korrigierte Flugbahn der Fahrzeuge zur Berechnung der Aufprallkinematik nach MATLAB exportiert. Schließlich wurden die bereinigten Daten und die Fahrzeugnetze in Unreal Engine 5 integriert, wo die Szene mit HDR-Beleuchtung und realistischer Physik nachgebildet wurde, um den genauen Kollisionspunkt und das fehlgeschlagene Ausweichmanöver zu visualisieren.
Lehren für die Validierung der LiDAR-Infrastruktur 📐
Dieser Fall unterstreicht die Notwendigkeit, dynamische Kalibrierungsverfahren für V2X-Sensoren zu implementieren. Die Ausdehnung des Pfostens, ein vorhersagbares physikalisches Phänomen, kann die Wahrnehmung eines autonomen Fahrzeugs verzerren, ohne dass die bordeigenen Systeme dies erkennen. Die Kombination von Werkzeugen wie CloudCompare für die geometrische Analyse und Unreal Engine 5 für die visuelle Simulation etabliert sich als De-facto-Standard in der Unfallforschung für vernetzte Mobilität. Es geht nicht nur darum, einen Unfall zu rekonstruieren, sondern zu verstehen, wie die physische Umgebung und die digitale Infrastruktur interagieren, um zu versagen oder Leben zu retten.
Ist es möglich, einen LiDAR-Kalibrierungsfehler an einer V2X-Kreuzung durch die Analyse von Reflexionsmustern statischer Objekte zu erkennen, bevor ein Unfall wie der beschriebene eintritt?
(PS: Bei der Szenenanalyse ist jeder Maßstabszeuge ein kleiner, anonymer Held.)