Der Aiper Scuba S1 Pro stellt einen Sprung in der Robotik für den Haushalt dar, indem er die Abhängigkeit von Schläuchen und externen Stromanschlüssen beseitigt. Dieser kabellose Poolreinigungsroboter integriert ein proprietäres Navigationssystem namens WavePath 2.0, das ihm eine umfassende Reinigung des Beckens ermöglicht. Seine Energieautonomie und seine Fähigkeit, Wände zu erklimmen und die Wasserlinie zu bearbeiten, machen ihn zu einem idealen Studienobjekt, um zu analysieren, wie 3D-Automatisierung komplexe Wartungsprobleme löst.
Sensorarchitektur und WavePath 2.0 Algorithmus 🤖
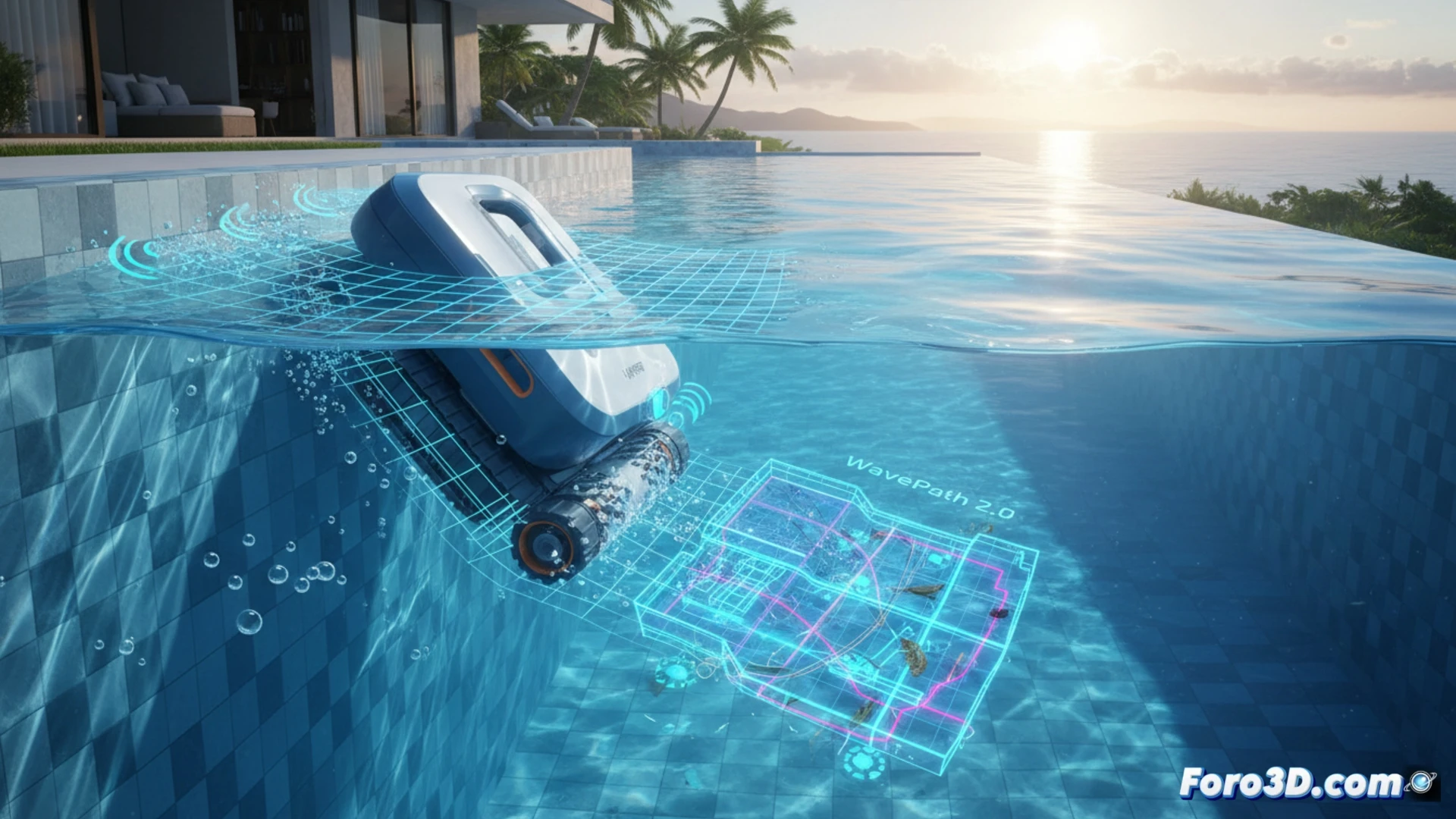
Der Schlüssel zur Leistung des Scuba S1 Pro liegt in seinem volumetrischen Kartierungsalgorithmus. Im Gegensatz zu Robotern, die auf Kontaktsensoren oder einfache Gyroskope angewiesen sind, nutzt das WavePath 2.0 System eine Kombination aus Drei-Achsen-Beschleunigungsmessern und Differenzdrucksensoren, um eine dreidimensionale Karte der Umgebung zu erstellen. Der Roboter prallt nicht einfach zufällig umher; er berechnet spiralförmige und parallele Bahnen, um den Boden, die Wände und die Wasserlinie abzudecken. Wenn er durch den Neigungssensor einen Winkelwechsel erkennt, aktiviert er die Antriebsmotoren, um die senkrechte Wand zu erklimmen, wobei er den von seiner Doppellaufradpumpe erzeugten Sog nutzt, um an der Oberfläche zu haften. An der Wasserlinie angekommen, reduziert er die Geschwindigkeit und fährt seine Seitenbürsten aus, um angesammelte Rückstände abzuschaben, und stellt sicher, dass 100% des Umfangs ohne unnötige Überlappungen abgedeckt werden.
3D-Automatisierung vs. Traditionelle Systeme 🏊
Im Vergleich zu kabelgebundenen Poolrobotern oder Zufallsmodellen demonstriert der S1 Pro eine überlegene Energie- und Zeiteffizienz. Traditionelle Systeme verschwenden oft Zeit mit der Reinigung bereits abgedeckter Bereiche oder bleiben an Hindernissen wie Treppen hängen. Die 3D-Automatisierung des Scuba S1 Pro optimiert durch die Kartierung des gesamten Wasservolumens die Rückkehr zur Ladestation und priorisiert Bereiche mit höherer Schmutzansammlung. Dies reduziert nicht nur die Reinigungszykluszeit um schätzungsweise 30%, sondern minimiert auch den mechanischen Verschleiß durch die Vermeidung ständiger Kollisionen. Dieser Roboter zeigt, dass die wahre Innovation in der Haushaltsrobotik nicht nur in der Saugleistung liegt, sondern in der Intelligenz, sich effizient in einer komplexen dreidimensionalen Umgebung wie einem Pool zu bewegen.
Auf welche Weise löst die Implementierung autonomer Navigationsalgorithmen in einem Poolroboter wie dem Aiper Scuba S1 Pro die Hauptherausforderungen der Energieeffizienz und vollständigen Abdeckung in unstrukturierten Wasserumgebungen?
(PS: Roboter zu simulieren macht Spaß, bis sie beschließen, deinen Befehlen nicht zu folgen.)