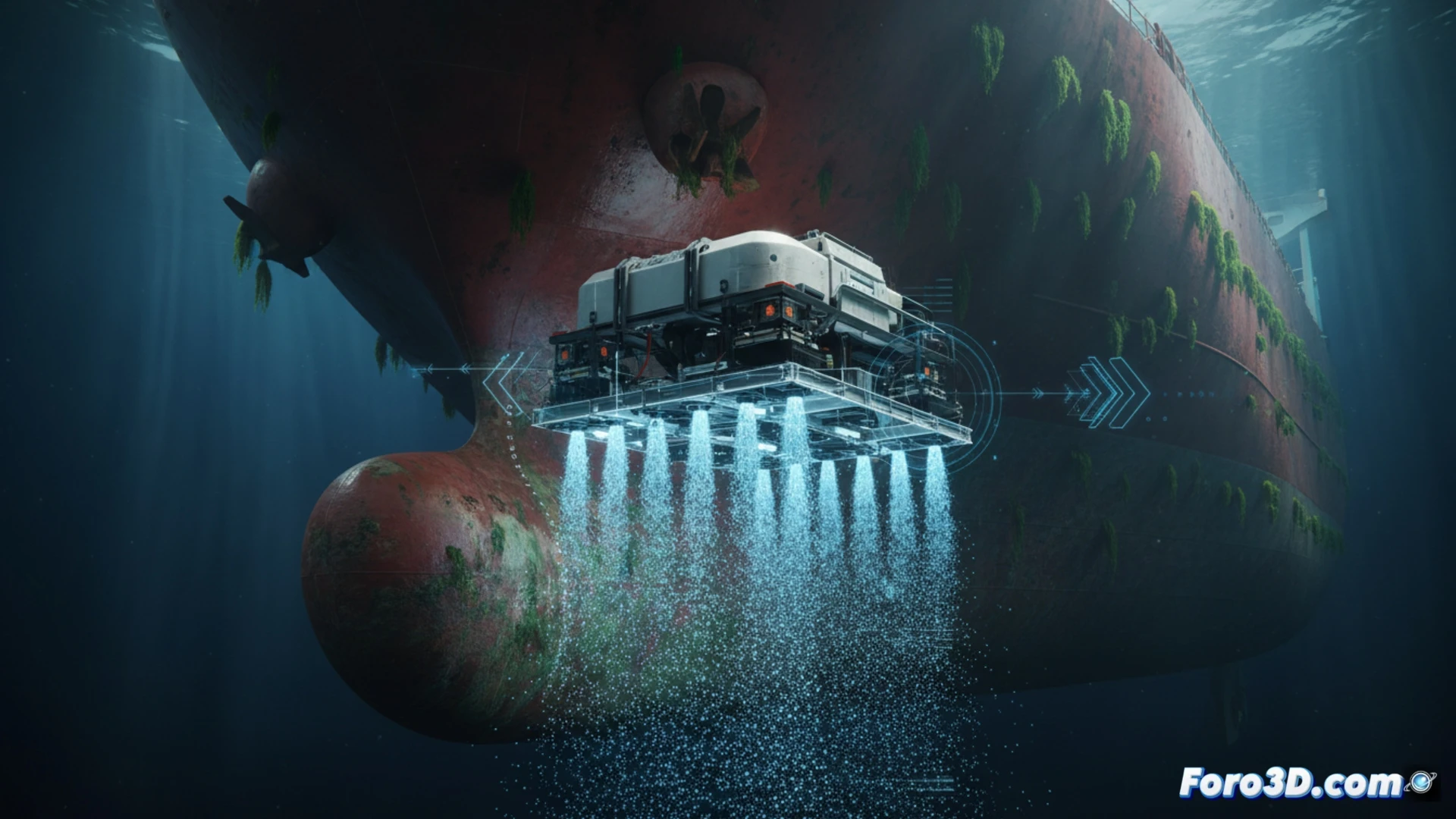
Der HullWiper ist ein ferngesteuertes Unterwasserfahrzeug (ROV), das entwickelt wurde, um Schiffsrümpfe mit Hochdruckwasserstrahlen zu reinigen, ohne die Korrosionsschutzfarbe zu beschädigen. Seine 3D-Modellierung erfordert die Erfassung der Rumpfgeometrie, der Strahldüsen und der Fluiddynamik. Dieser Artikel erläutert den technischen Arbeitsablauf zur Simulation seines Betriebs in virtuellen Umgebungen, um die Kraftstoffeffizienz und die Lebensdauer der Schiffsbeschichtung zu optimieren.
Technischer Arbeitsablauf: Scannen, Vernetzung und Bahnsimulation 🤖
Der Prozess beginnt mit dem Laserscanning des Schiffsrumpfes, um eine Punktwolke zu erzeugen. Diese wird in CAD-Software (wie Blender oder Rhino) in ein hochauflösendes Polygonnetz umgewandelt. Anschließend wird das Modell des ROV HullWiper integriert, das mit Servomotoren und schwenkbaren Düsen ausgestattet ist. Zur Simulation der Wasserstrahlen werden dynamische Partikel oder Fluide auf Basis der SPH-Methode (Smoothed Particle Hydrodynamics) verwendet. Der nächste Schritt besteht darin, Reinigungsbahnen mittels Sweep-Algorithmen zu definieren, wobei Winkel vermieden werden, die die Farbe erodieren könnten. Die abschließende Simulation validiert den Druck und die Einwirkzeit, wobei die Parameter so angepasst werden, dass die Haftgrenzen der Beschichtung nicht überschritten werden.
Virtuelle Optimierung: Effizienz und Vermeidung von Farbschäden 🚢
Die 3D-Simulation ermöglicht das Testen hunderter Konfigurationen ohne reale Risiken. Durch die Visualisierung der Druckverteilung auf dem Rumpf werden kritische Bereiche identifiziert, in denen der Strahl die Farbe ablösen könnte. Durch die Anpassung des Abstands und des Winkels der Düsen im Modell wird eine gleichmäßige Reinigung mit 20 % weniger Betriebszeit erreicht. Dieser Ansatz reduziert den Kraftstoffverbrauch des Schiffes um bis zu 10 % und verlängert die Lebensdauer der Beschichtung, was zeigt, dass Unterwasserrobotik und 3D-Modellierung unverzichtbare Verbündete in der modernen Schiffsautomatisierung sind.
Welche CFD-Simulationsparameter sollten bei der 3D-Modellierung der Wasserstrahlen des ROV HullWiper berücksichtigt werden, um die Reinigungseffizienz zu optimieren, ohne den Schiffsrumpf zu beschädigen?
(PS: Roboter zu simulieren macht Spaß, bis sie sich entscheiden, deinen Befehlen nicht zu folgen.)