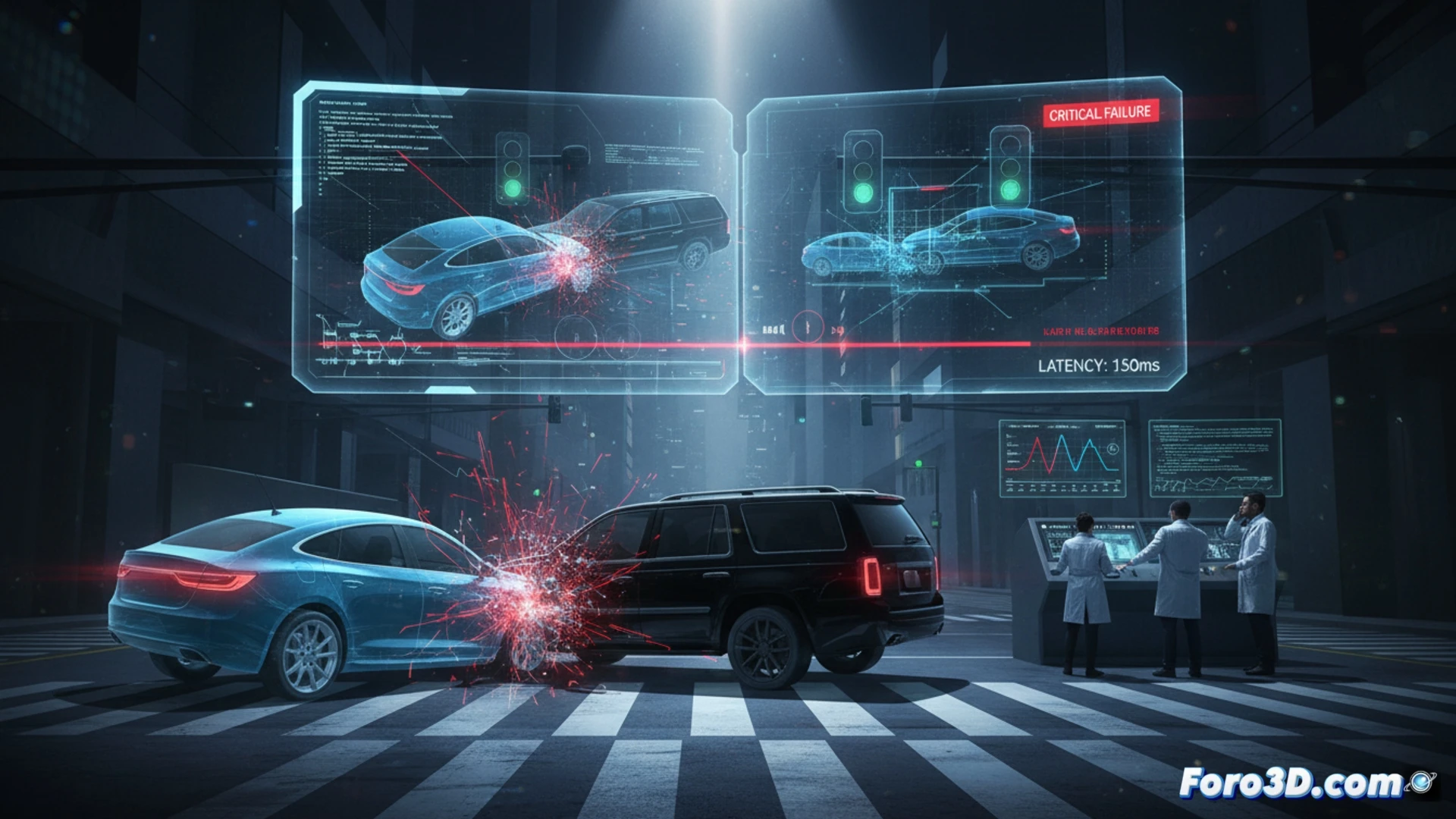
Ein Unfall an einer intelligenten Kreuzung ereignete sich, als die V2X-Ampel freie Fahrt signalisierte, das autonome Fahrzeug jedoch nicht rechtzeitig reagierte. Um den Fehler aufzuklären, wurde ein exakter digitaler Zwilling der Kreuzung erstellt. Dieses Modell replizierte die reale Umgebung mithilfe von LIDAR-Daten von der Straße und ermöglichte es den Ingenieuren, die kritische Variable zu isolieren: die Latenz zwischen der Sensordetektion und der Fahrzeugreaktion. Ziel war es, die zeitliche Diskrepanz zu finden, die ein grünes Licht in eine tödliche Falle verwandelte.
Import von LIDAR-Punktwolken und Latenzsimulation in Unity 🚦
Der Prozess begann mit der Erfassung der Straßengeometrie durch einen fest installierten LIDAR-Sensor an der Straße. Die Rohdaten wurden in CloudCompare verarbeitet, um Rauschen zu entfernen und die Punktwolken mit dem CAD-Modell der Kreuzung abzugleichen. Dieses optimierte Netz wurde in Unity importiert, wo der digitale Zwilling erstellt wurde. Um den Unfall zu replizieren, wurde ein Skript programmiert, das die Latenz des V2X-Netzwerks simulierte. In Unreal Engine 5 wurde die genaue Sequenz visualisiert: Der LIDAR-Sensor erkannte einen Fußgänger und sendete das Signal, aber das autonome Fahrzeug erhielt den Bremsbefehl mit einer Verzögerung von 120 Millisekunden – genug, um den Aufprall auszulösen. MATLAB analysierte die Zeitstempel des Zwillings, verglich den LIDAR-Zeitstempel mit dem ECU-Zeitstempel des Fahrzeugs und bestätigte die kritische Diskrepanz.
Lehren für sicherere intelligente Infrastrukturen 🛠️
Der digitale Zwilling zeigte, dass der Fehler weder am Sensor noch am Fahrzeug lag, sondern am V2X-Synchronisationsprotokoll. Die Latenz von 120 ms, obwohl gering, erwies sich in einer Hochgeschwindigkeitsumgebung als fatal. Die Lösung ist nicht nur schnellere Hardware, sondern die Implementierung eines temporären Sicherheitspuffers in der Ampelsensorik, validiert durch Simulationen in digitalen Zwillingen. Dieser Fall unterstreicht, dass die Zuverlässigkeit einer intelligenten Stadt von der perfekten Synchronisation zwischen ihren virtuellen Zwillingen und ihren physischen Systemen abhängt.
Als Ingenieur: Welche spezifische Latenz in Millisekunden zwischen der V2X-Ampel und der Cloud des digitalen Zwillings verursachte die fatale Verzögerung in der Reaktion des autonomen Fahrzeugs?
(PS: Mein digitaler Zwilling ist gerade in einer Besprechung, während ich hier modelle. Also bin ich technisch gesehen an zwei Orten gleichzeitig.)