Der Bruch einer mikrochirurgischen Nadel während einer Roboteroperation stellt ein kritisches technisches Dilemma dar: Versagte das Material durch Ermüdung oder war es der übermäßige Druck des Roboters? Das geborgene Fragment wird einer forensischen Analyse mittels 3D-Elektronenmikroskopie (ZEISS ZEN) und Mikro-Finite-Elemente-Simulation (Abaqus) unterzogen. Dieser Artikel erläutert den Arbeitsablauf zur Bestimmung der Grundursache des strukturellen Versagens.
Forensischer Arbeitsablauf: Von der 3D-Mikrografie zur Ermüdungssimulation 🔬
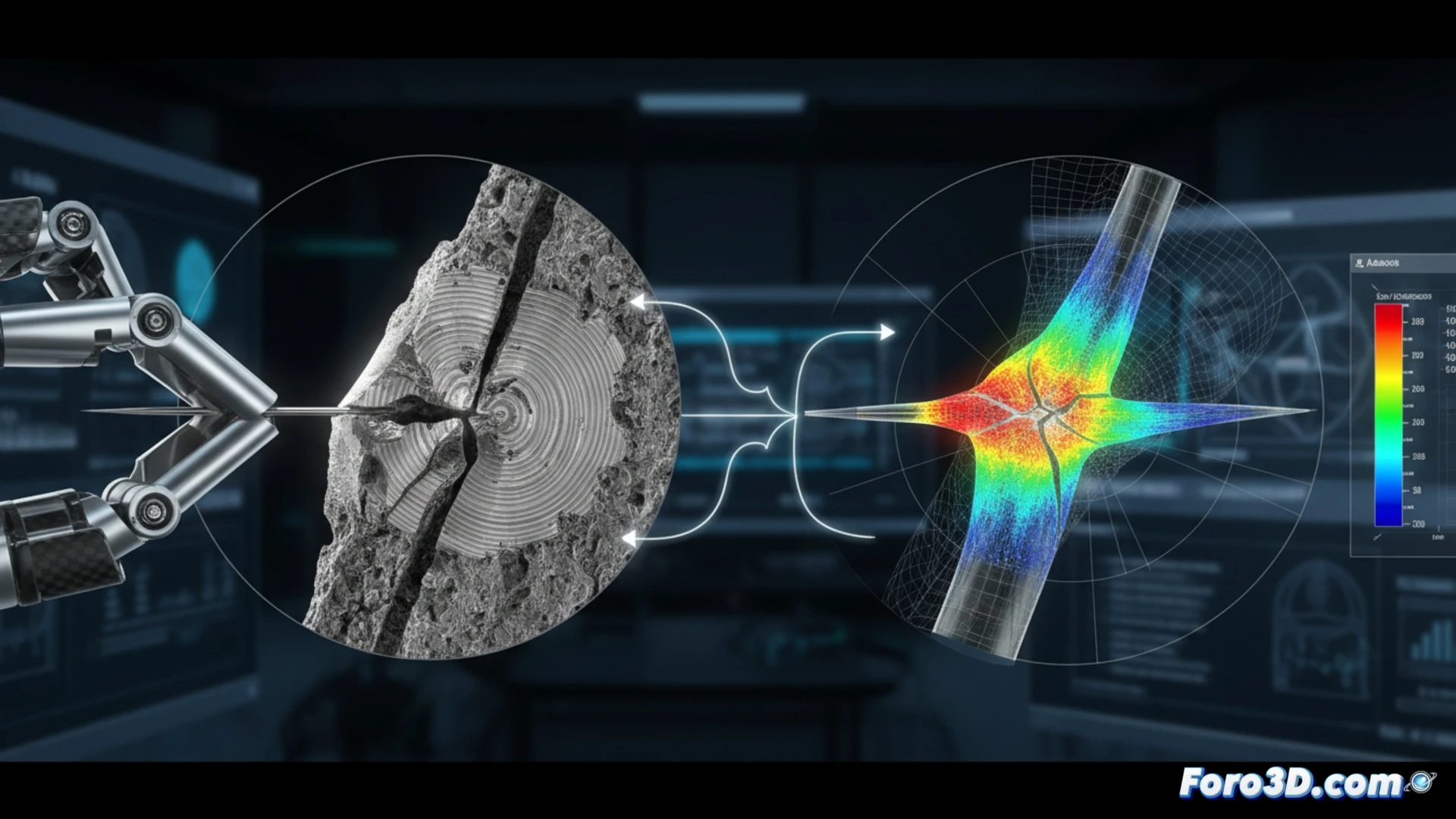
Der Prozess beginnt mit der Erfassung der Oberflächentopographie des Fragments in ZEISS ZEN, wodurch ein hochauflösendes 3D-Modell erstellt wird, das Rissausbreitungsspuren und Ermüdungsstreifen offenbart. Dieses Modell wird in Materialise Mimics exportiert, um die reale Geometrie zu segmentieren und Artefakte zu korrigieren. Anschließend wird es in Abaqus für eine Mikro-FEA importiert, die die typischen zyklischen Belastungen der robotergestützten Naht simuliert. Die Analyse vergleicht zwei Szenarien: akkumulierte Ermüdung durch wiederholte Zyklen versus eine punktuelle Überlast, die die Streckgrenze des Edelstahls 316L überschreitet. Die Von-Mises-Spannungsverteilung an der Nadelspitze bestimmt, ob das Versagen mit der Kontaktzone gegen das Knochengewebe übereinstimmt.
Das Dilemma des haptischen Feedbacks: Kontrollierter Druck oder Softwarefehler? 🤖
Die Simulation zeigt, dass eine punktuelle Überlast ein sprödes Bruchmuster mit sauberen Kanten erzeugt, während Ermüdung fortschreitende Streifen und lokalisierte plastische Verformung verursacht. Wenn das Modell in Abaqus bestätigt, dass die maximale Spannung die Materialgrenze nur unter Bedingungen anhaltenden Drucks überschritten hat, deutet die Ursache auf einen Fehler in der Haptic-Feedback-Software hin. Diese Analyse entlastet nicht nur das Material, sondern zwingt zur Neukalibrierung der Widerstandsalgorithmen des Roboters, um zukünftige Vorfälle zu vermeiden.
In einer forensischen FEA-Simulation einer während einer Roboteroperation gebrochenen chirurgischen Nadel: Wie kann zwischen einem Versagen durch zyklische Ermüdung aufgrund unerkannter Mikrovibrationen und einem Versagen durch punktuelle Überlast, verursacht durch die Steifigkeit des Roboteraktors, unterschieden werden?
(PS: Materialermüdung ist wie deine nach 10 Stunden Simulation.)