Der jüngste Ausfall eines chirurgischen Roboters während einer Fernoperation hat in der Automatisierungsbranche Alarm ausgelöst. Der Vorfall, bei dem das Skalpell eine fatale, unberechenbare Bewegung ausführte, hatte seinen Ursprung im Roboterarm. Eine forensische Analyse mit optischer Messtechnik ergab, dass die Ursache kein Softwarefehler war, sondern ein asymmetrischer Mikroverschleiß an den Servomotoren und Getrieben, hervorgerufen durch eine Latenz im Steuersignal.
Präzisionsmesstechnik: Scannen und Ermüdungsanalyse 🔬
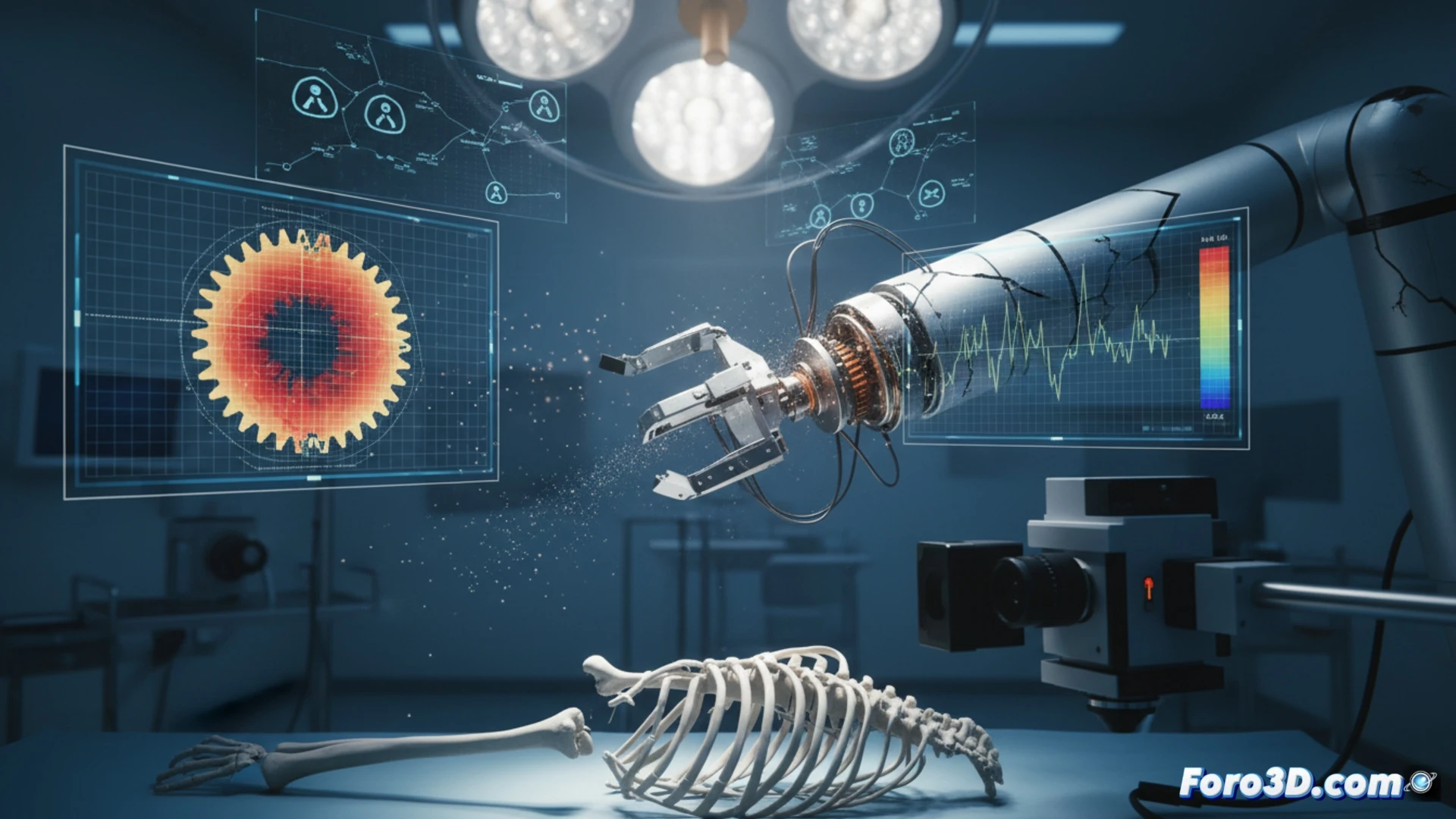
Um die Grundursache zu ermitteln, wurde der Scanner GOM ATOS Q verwendet, um die Geometrie der Servos und Getriebe des Roboters zu erfassen. Die Messtechnik-Software erkannte Abweichungen von nur wenigen Mikrometern an den Kontaktflächen – einen asymmetrischen Verschleiß, der mit bloßem Auge nicht zu erkennen war. Dieses Verschleißmuster korrelierte mit den konstanten Mikrovibrationen, die während der Operation in MATLAB aufgezeichnet wurden. Die Latenz im Steuersignal, für den Chirurgen kaum wahrnehmbar, führte dazu, dass die Servos oszillierten und überkorrigierten, was eine zyklische Ermüdung der Legierungszahnräder verursachte. Modelle in SolidWorks bestätigten, dass die akkumulierte Spannung die Ermüdungsgrenze des Materials überschritt, was zum Verlust der millimetergenauen Präzision führte.
Lehren für digitale Zwillinge und prädiktive Steuerung ⚙️
Dieser Fall zeigt, dass die chirurgische Robotik nicht nur von der Präzision der Software abhängt, sondern auch von der mechanischen Integrität auf mikrometrischer Ebene. Die vorgeschlagene Lösung besteht in der Implementierung digitaler Zwillinge in Blender und SolidWorks, die den Verschleiß in Echtzeit simulieren, gespeist mit Latenzdaten. Ein vorausschauendes Wartungssystem, basierend auf der Analyse von Vibrationsspektren in MATLAB, könnte diese Oszillationen erkennen, bevor sie kritischen Verschleiß verursachen. Der Fehler lag nicht in der Hardware, sondern in einem Steuerungsdesign, das die netzwerkbedingte mechanische Ermüdung ignorierte.
Wie kann die Branche der chirurgischen Robotik das Risiko von Mikroverschleiß in den Aktuatoren mindern, der durch Signallatenz bei Fernoperationen über große Entfernungen verursacht wird?
(PS: Roboter zu simulieren macht Spaß, bis sie beschließen, deinen Befehlen nicht mehr zu folgen.)