Der jüngste Verschleißvorfall an einem chirurgischen Roboterarm eröffnet die Debatte über Materialermüdung in hochpräzisen Umgebungen neu. Im Gegensatz zur Industrierobotik, wo ein Ausfall ein Fließband stoppen kann, gefährdet Verschleiß in der assistierten Chirurgie direkt die Patientensicherheit. Dieser technische Artikel analysiert die Ursachen des mechanischen Verschleißes, den Einsatz digitaler Zwillinge zur Simulation zyklischer Belastung und Strategien zur vorausschauenden Wartung auf Basis von 3D-Modellen.
Simulation kritischer Ermüdungspunkte mittels digitaler Zwillinge 🔧
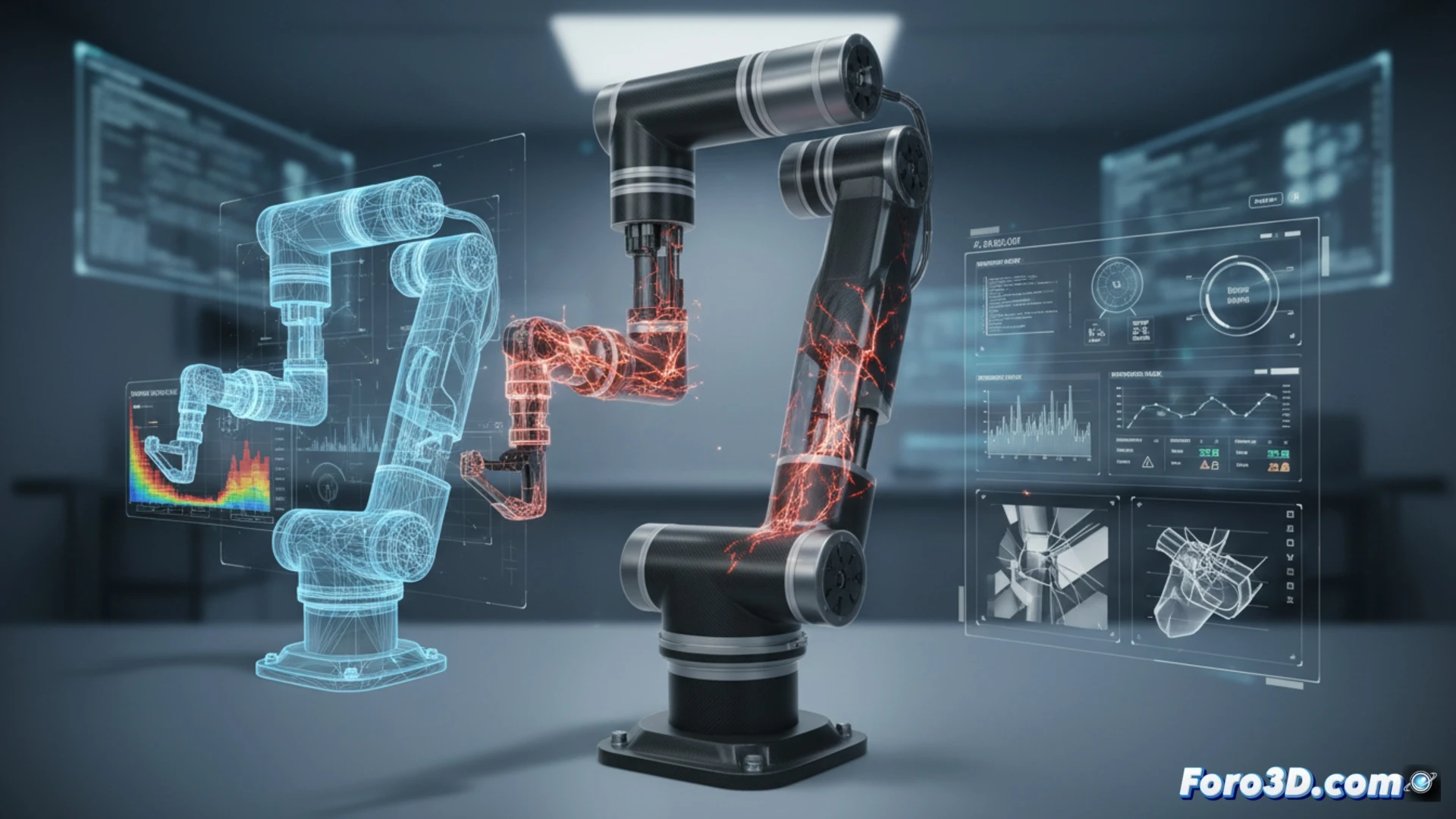
Der Verschleiß an einem chirurgischen Roboterarm konzentriert sich typischerweise auf die Kugelgelenke und die harmonischen Getriebe, wo das wiederholte Drehmoment Mikrorisse erzeugt. Durch Finite-Elemente-Simulationen, die in digitale Zwillinge integriert sind, können Ingenieure die Spannungsverteilung in Echtzeit visualisieren. Ein 3D-Modell des Da-Vinci-Arms zeigt beispielsweise, dass das Ellenbogengelenk 40 % mehr Last trägt als in den ursprünglichen Konstruktionen geschätzt. Diese Technik, kombiniert mit Vibrationssensoren, ermöglicht es, Ausfälle Wochen im Voraus vorherzusagen und die Schmierungszyklen oder den Austausch kritischer Komponenten vor einem tatsächlichen Eingriff anzupassen.
Sicherheitsimplikationen und das Dilemma der reaktiven Wartung ⚠️
Die wichtigste Lehre aus diesem Vorfall ist, dass die medizinische Robotik sich keinen reaktiven Ansatz leisten kann. Jeder unentdeckte Mikroverschleiß kann zu einer millimetergenauen Abweichung während einer Naht führen. Der Einsatz von 3D-Simulationen optimiert nicht nur die Wartungskosten, sondern definiert auch die Zertifizierungsprotokolle neu. Zu fordern, dass jeder chirurgische Arm einen digitalen Zwilling mit aktuellen Ermüdungsdaten hat, sollte Standard sein, keine Option. Die Technologie zur Vorhersage von Ausfällen existiert; die Herausforderung besteht darin, sie zu implementieren, bevor Verschleiß zu einem vermeidbaren Risiko wird.
In Anbetracht des jüngsten Verschleißvorfalls an einem chirurgischen Roboterarm: Welche Methoden der prädiktiven Simulation oder Echtzeit-Überwachungssensoren könnten implementiert werden, um mechanische Ermüdung in den Gelenken vorherzusehen, bevor sie die Patientensicherheit gefährdet?
(PS: Roboter zu simulieren macht Spaß, bis sie beschließen, deinen Befehlen nicht zu folgen.)