Die Sabotage an einem Motor-Schraubroboter hat eine seltene technische Schwachstelle offengelegt: die Veränderung des Anzugsdrehmoments durch eine elektronische Verschiebung im Wandler des Spindelkopfes. Dieser Vorfall, der die Montagelinie beeinträchtigte, wurde mit 3D-Werkzeugen wie GOM Inspect und Blender analysiert, um die Fehlerabfolge zu rekonstruieren und den Ursprung der Manipulation zu ermitteln.
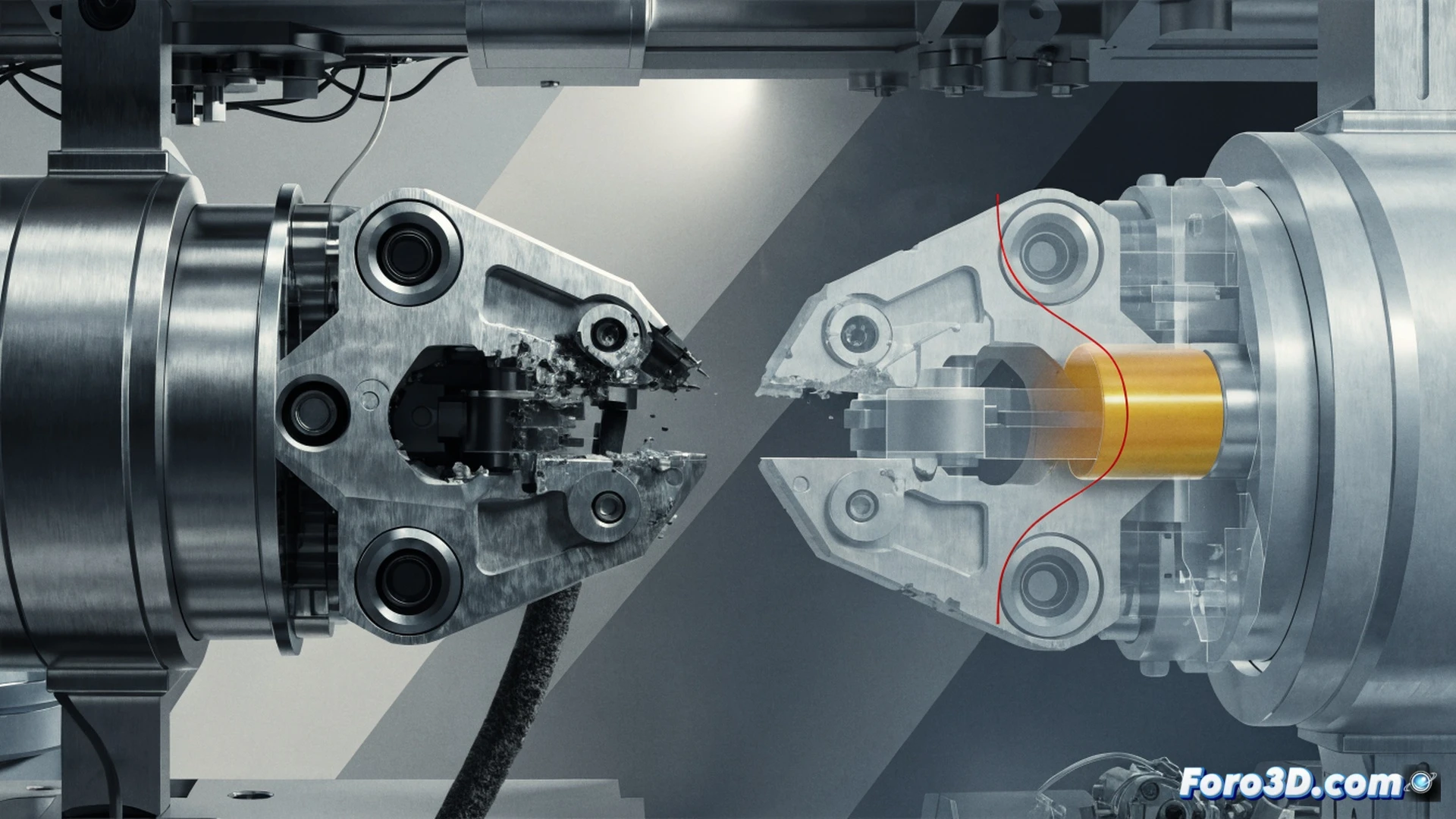
Forensische 3D-Rekonstruktion der Sabotage am Schraubspindelkopf 🔧
Die Analyse mit GOM Inspect ermöglichte es, den Spindelkopf zu scannen und Abweichungen in der Geometrie des Wandlers zu erkennen, während Blender verwendet wurde, um die Roboterbahn und den genauen Zeitpunkt der Verschiebung zu simulieren. Es wurde festgestellt, dass ein gefälschtes elektronisches Signal das tatsächlich angewandte Drehmoment veränderte, was zu unzureichenden oder übermäßigen Anzügen führte. Diese Methode, die bei Sichtprüfungen schwer zu erkennen ist, erforderte einen Datenabgleich zwischen dem Drehmomentverlauf und den 3D-Netzen, um die Anomalie zu bestätigen.
Der widerspenstige Schrauber: Wenn ein Roboter beschließt, auf seine Weise anzuziehen 🤖
Das Kurioseste an dem Fall ist, dass der Roboter, weit davon entfernt, ein professioneller Saboteur zu sein, nur Befehle befolgte. Jemand sagte ihm: zieh hier locker an und dort fest, und der arme Mechanismus, ohne eigenen Verstand, tat es buchstabengetreu. Nun überprüfen die Techniker jeden Wandler, als wäre er ein Spion, und der Roboter wartet im Verhörraum auf seinen Einsatz, obwohl sein einziges Geständnis ein Fehlersignalton sein wird.