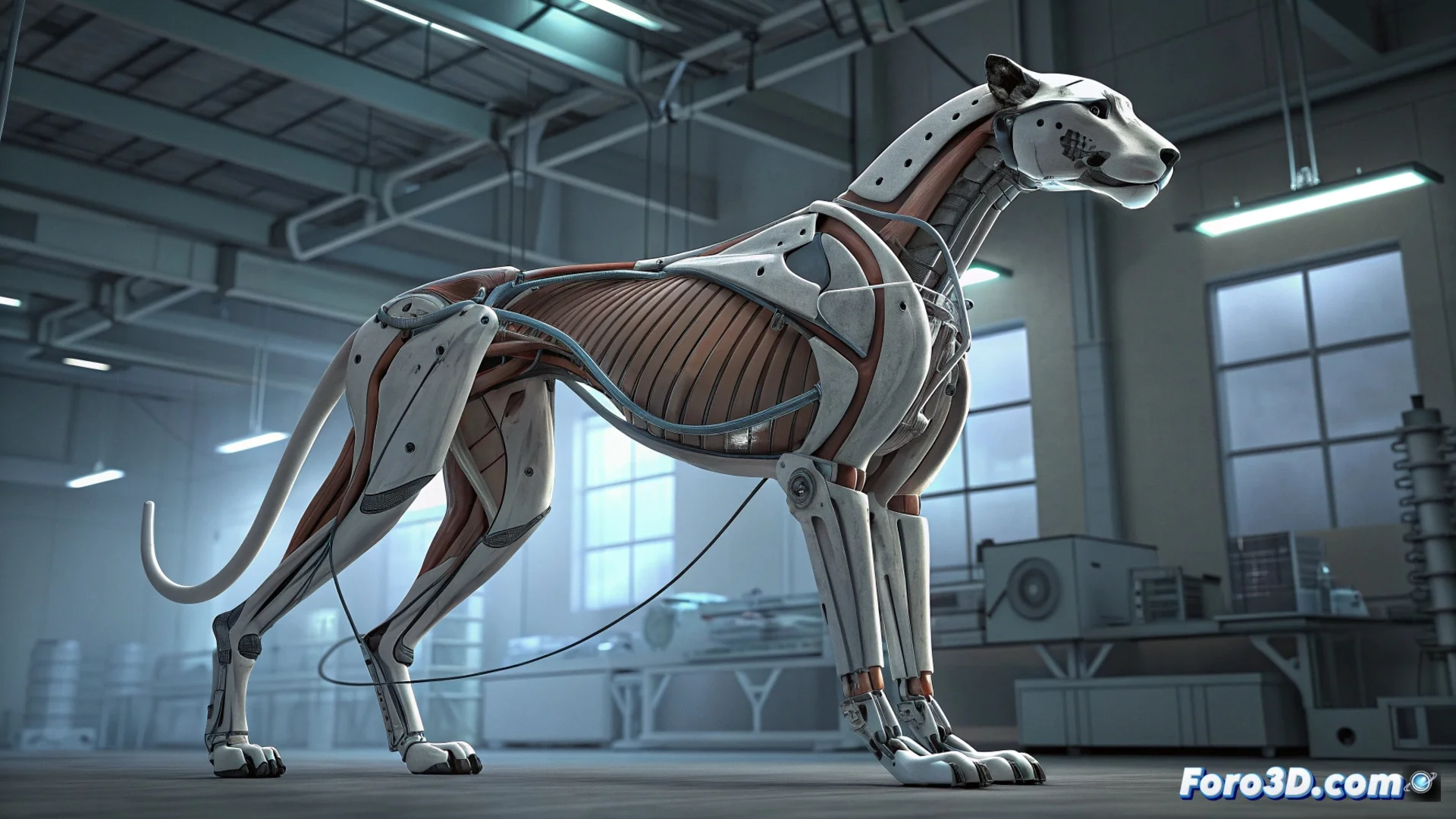
Pneupard: ein pneumatischer Vierbeiner-Roboter, der einen Gepard imitiert
An der Universität Osaka entwickelt ein Wissenschaftlerteam einen Vierbeiner-Roboter namens Pneupard, dessen Antriebssystem ausschließlich auf Druckluft basiert. Dieses Projekt zielt darauf ab, die Mechanik der Muskeln eines Geparden, des schnellsten Landtiers, zu replizieren. Indem elektrische Motoren durch pneumatische Aktuatoren ersetzt werden, erhält der Roboter eine natürliche Flexibilität, die ihm ermöglicht, sich dynamisch zu bewegen und sich an das Gelände anzupassen. 🐆
Die Pneumatik definiert seine Mobilität und Flexibilität
Das pneumatische System ist der Kern der Fähigkeiten von Pneupard. Die Aktuatoren, die mit Druckluft versorgt werden, dehnen und ziehen sich zusammen, um die echte Muskelkontraktion zu simulieren. Dies erzeugt eine Fortbewegung, die nicht nur potenziell schnell, sondern auch geschmeidig und mit inhärenter Elastizität ist. Die Compliance oder Anpassungsfähigkeit dieser Komponenten ermöglicht es dem Roboter, sicherer mit seiner Umgebung zu interagieren, da er Stöße abfedern und seine Kraft beim Bewegen modulieren kann. Dieser Ansatz stellt eine vielversprechende Alternative dar, um Roboter zu entwerfen, die auf unebenem oder veränderlichem Gelände operieren müssen.
Schlüsselvorteile des pneumatischen Systems:- Bietet eine intrinsische Flexibilität, die biologische Gewebe imitiert.
- Ermöglicht schnelle Bewegungen und natürliche Stoßabsorption.
- Erleichtert eine sicherere Interaktion mit unvorhersehbaren Umgebungen.
Die Eleganz der natürlichen Bewegung erfordert mehr als nur die Form nachzuahmen; sie muss die Physik der Muskeln replizieren.
Ein physisches Labor, um zu verstehen, wie Tiere sich bewegen
Der Hauptzweck von Pneupard ist nicht kommerziell, sondern als fortgeschrittenes Forschungsinstrument zu dienen. Die Forscher nutzen es als greifbares physisches Modell, um Theorien darüber zu testen, wie Tiere ihre Gliedmaßen koordinieren und das Gleichgewicht halten. Durch die Analyse der Daten seiner Gangmuster kann die Energieeffizienz, Stabilität und die Rhythmen der Fortbewegung in der Natur besser verstanden werden.
Potenzielle Anwendungen dieser Forschung:- Verbesserung des Designs von Laufrobotern für Rettung oder Erkundung.
- Inspiration für die Entwicklung natürlicherer und anpassungsfähigerer robotischer Prothesen.
- Schaffung neuer Systeme für die physikalische Rehabilitation basierend auf biologischen Bewegungen.
Der Weg zwischen Imitation und Gleichstellung
Obwohl seine Inspiration der schnelle Gepard ist, ähnelt die aktuelle Geschwindigkeit von Pneupard eher einem gemütlichen Spaziergang als einem Sprint. Dieses Detail unterstreicht ein grundlegendes Prinzip: Die Emulation der Raffinesse und Effizienz biologischer Systeme ist eine komplexe Ingenieursherausforderung. Pneupard ist nicht das Endziel, sondern ein entscheidender Schritt, um den Kreis zwischen Biologie und Robotik zu schließen, und zeigt, dass die eleganteste Lösung manchmal durch einfache Druckluft angetrieben wird. 🤖