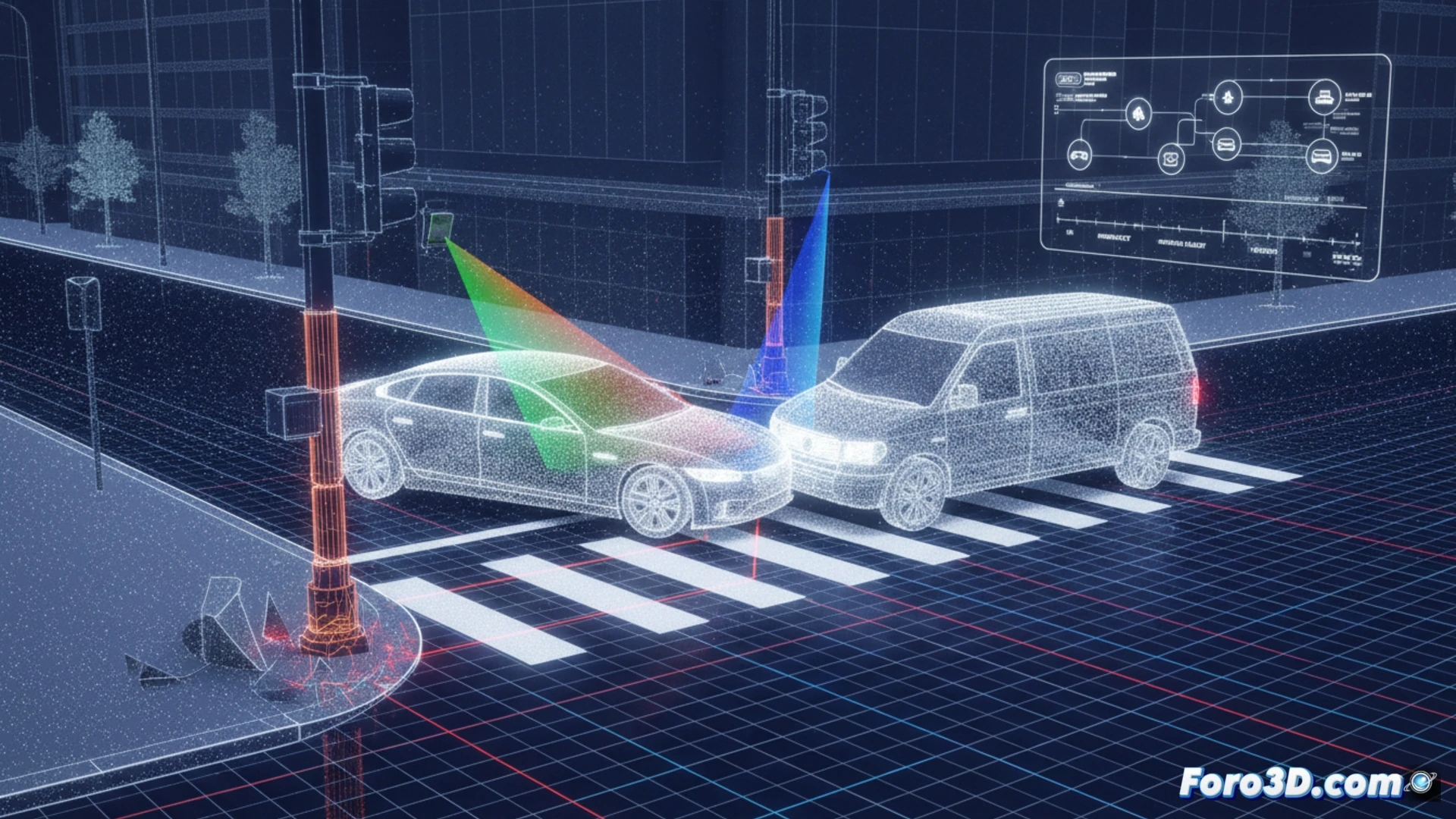
上个月,一个配备V2X基础设施激光雷达传感器的智能路口发生了一起两辆自动驾驶汽车相撞的事故。当局对控制系统明显的故障感到困惑,于是求助于3D取证流程来查明真相。主要假设指向因安装杆热膨胀导致的校准误差,这种故障在实时中难以检测,但对这些环境的安全至关重要。
技术工作流程:从点云到UE5仿真 🛠️
过程始于提取碰撞前几秒内路口激光雷达记录的原始点云数据。第一个关键步骤是将这些数据导入CloudCompare,在那里对静态点云(如杆、路缘)进行精细对齐(ICP配准),并与土木工程CAD模型进行比较。这一比较揭示了点云在Z轴上逐渐偏移了4.2厘米,这与环境温度的峰值时间吻合。确认校准误差后,将修正后的车辆轨迹导出到MATLAB,用于计算碰撞运动学。最后,清理后的数据和车辆网格被集成到Unreal Engine 5中,在那里使用HDR照明和真实物理效果重建场景,以可视化精确的碰撞点和失败的规避操作。
激光雷达基础设施验证的教训 📐
此案例强调了在V2X传感器中实施动态校准程序的必要性。杆的热膨胀是一种可预测的物理现象,它可能使自动驾驶汽车的感知发生偏差,而车载系统却无法检测到。结合CloudCompare等工具进行几何分析,以及Unreal Engine 5进行视觉仿真,已成为互联移动事故调查的事实标准。这不仅仅是重建事故,而是理解物理环境和数字基础设施如何相互作用,从而导致失败或拯救生命。
是否有可能通过分析静态物体的反射率模式,在像描述的事故发生之前,检测到V2X路口的激光雷达校准误差?
(附注:在场景分析中,每个比例尺标记都是一个小小的无名英雄。)