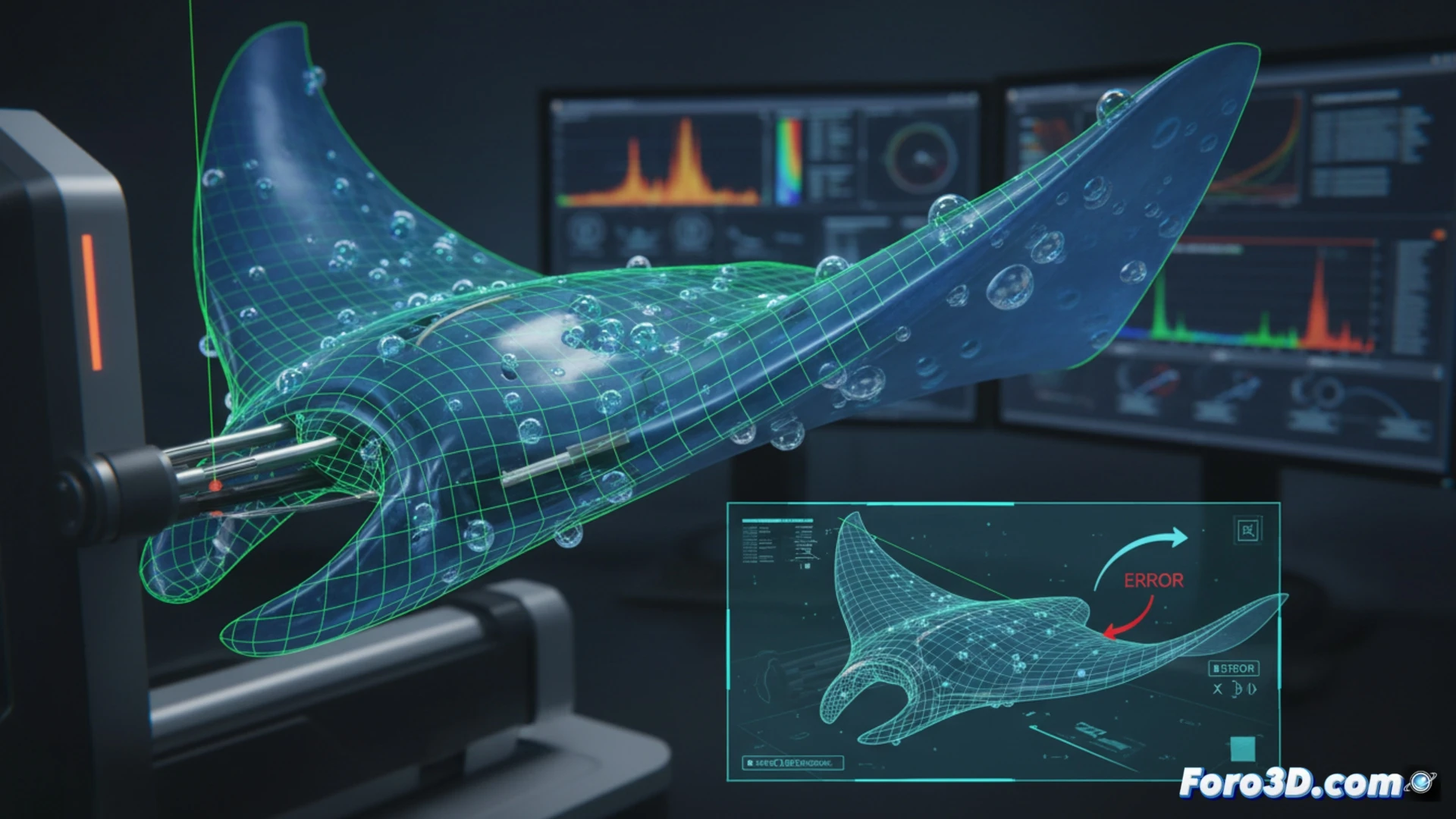
一款旨在模仿蝠鲼波浪式运动的高级水下探索机器人,在测试水池中完全失控。该故障导致原型机无法进行非对称转向,已通过高精度3D鉴定分析。调查聚焦于采用真空浇铸工艺制造的硅胶鳍片,怀疑过程中滞留的空气改变了导航所需的柔韧性。
使用VGSTUDIO MAX和Ansys FSI进行体积诊断 🛠️
鉴定团队利用VGSTUDIO MAX对硅胶鳍片进行计算机断层扫描,发现材料中分布着不规则微气泡。这些肉眼不可见的夹杂物导致了局部刚性区域。为评估动态影响,在Ansys中执行了流固耦合(FSI)模拟。在Blender中为科学可视化重建的数字模型证明,柔韧性的不对称性阻碍了左右翼之间的推力差,从而消除了机器人的转向能力。
自然生物力学的启示 🌊
此案例凸显了软体机器人中材料均匀性的重要性。在自然界中,真正的蝠鲼拥有无内部缺陷的柔性软骨,能够精确控制水流。3D鉴定不仅解决了技术故障,还揭示了真空浇铸制造缺陷如何破坏生物力学和谐。FSI模拟因此成为在真实海洋环境中部署前验证机器人假肢不可或缺的工具。
作为科学可视化专家,您会推荐哪些体积渲染和CT数据分割技术,以揭示柔性机器人执行器基质中微气泡在其疲劳循环期间的成核和扩展过程?
(附注:模拟海洋的流体物理学就像大海本身:难以预测,而且你总是会耗尽内存)