Aiper Scuba S1 Pro 代表了家用服务机器人领域的一次飞跃,摆脱了对外部软管和电源连接的依赖。这款无线泳池清洁机器人集成了名为 WavePath 2.0 的专有导航系统,使其能够对泳池池底进行全面清洁。其自主续航能力、爬墙以及处理水线区域的能力,使其成为分析 3D 自动化如何解决复杂维护问题的理想案例研究。
传感器架构与 WavePath 2.0 算法 🤖
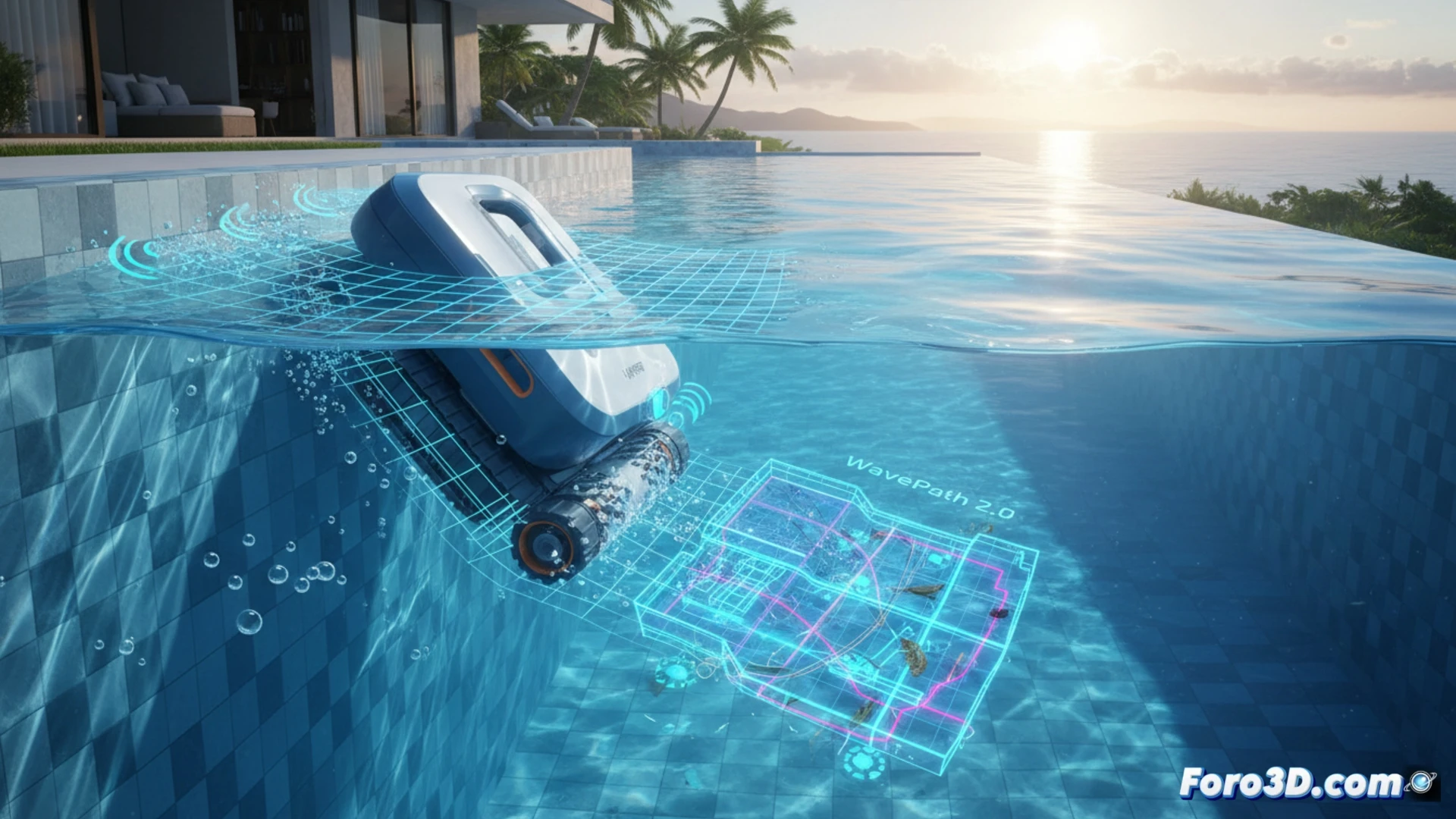
Scuba S1 Pro 性能的关键在于其体积测绘算法。与依赖接触传感器或简单陀螺仪的机器人不同,WavePath 2.0 系统利用三轴加速度计和差压传感器的组合来构建周围环境的三维地图。该机器人并非随机反弹;它会计算螺旋和平行轨迹,以覆盖池底、池壁和水线。当通过倾斜传感器检测到角度变化时,它会启动牵引电机以攀爬垂直池壁,利用双叶轮泵产生的吸力吸附在表面。一旦到达水线,它会降低速度并伸出侧刷,刮除积聚的碎屑,确保 100% 的周边区域得到覆盖,且无不必要的重叠。
3D 自动化 vs. 传统系统 🏊
与有线泳池机器人或随机型号相比,S1 Pro 展现出卓越的能效和时间效率。传统系统通常会浪费时间清洁已覆盖的区域,或者卡在楼梯等障碍物上。Scuba S1 Pro 的 3D 自动化通过测绘整个水体体积,优化了返回充电站的路径,并优先处理污垢积聚较多的区域。这不仅使清洁周期时间估计缩短了 30%,还通过避免持续碰撞来最大限度地减少机械磨损。这款机器人证明了家用机器人领域的真正创新不仅在于吸力,更在于在复杂的 3D 环境(如泳池)中高效移动的智能。
在像 Aiper Scuba S1 Pro 这样的泳池机器人中实施自主导航算法,是如何解决非结构化水生环境中能效和全面覆盖的主要挑战的?
(附注:模拟机器人很有趣,直到它们决定不听从你的指令。)