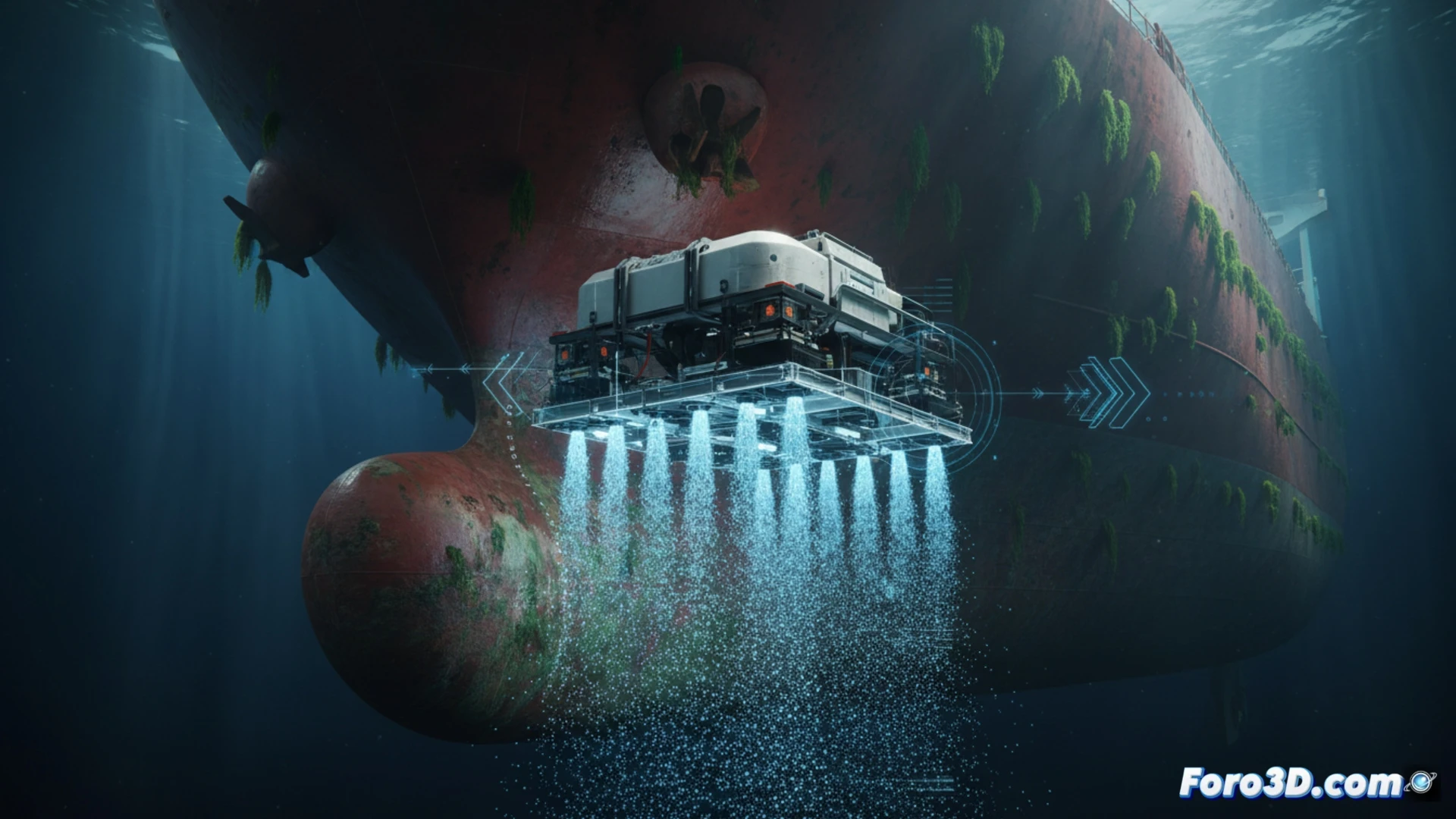
HullWiper 是一种远程操控的水下航行器(ROV),专为通过高压水射流清洁船体而设计,且不会损坏防腐涂层。其3D建模需要捕捉船体几何形状、喷嘴结构以及流体动力学。本文详细解析了在虚拟环境中模拟其运行的技术工作流程,以优化燃油效率并延长船用涂层的使用寿命。
技术工作流程:扫描、网格化与轨迹模拟 🤖
流程始于对船体进行激光扫描,生成点云数据。随后在CAD软件(如Blender或Rhino)中将其转换为高分辨率多边形网格。接着集成ROV HullWiper模型,该模型配备伺服电机和可调喷嘴。为模拟水射流,采用基于SPH(光滑粒子流体动力学)方法的动态粒子或流体系统。下一步是通过扫描算法定义清洁轨迹,避免可能侵蚀涂层的角度。最终模拟验证压力与暴露时间,调整参数以确保不超过涂层的附着力极限。
虚拟优化:效率提升与涂层损伤预防 🚢
3D模拟允许在无实际风险的情况下测试数百种配置。通过可视化船体上的压力分布,可识别出射流可能剥离涂层的临界区域。在模型中调整喷嘴的距离和角度后,可实现均匀清洁,同时减少20%的操作时间。这种方法可将船舶燃油消耗降低高达10%,并延长涂层寿命,证明水下机器人技术与3D建模是现代船舶自动化中不可或缺的盟友。
在ROV HullWiper水射流的3D建模中,应考虑哪些CFD模拟参数,以优化清洁效率且不损伤船体?
(附注:模拟机器人很有趣,直到它们决定不听从你的指令。)