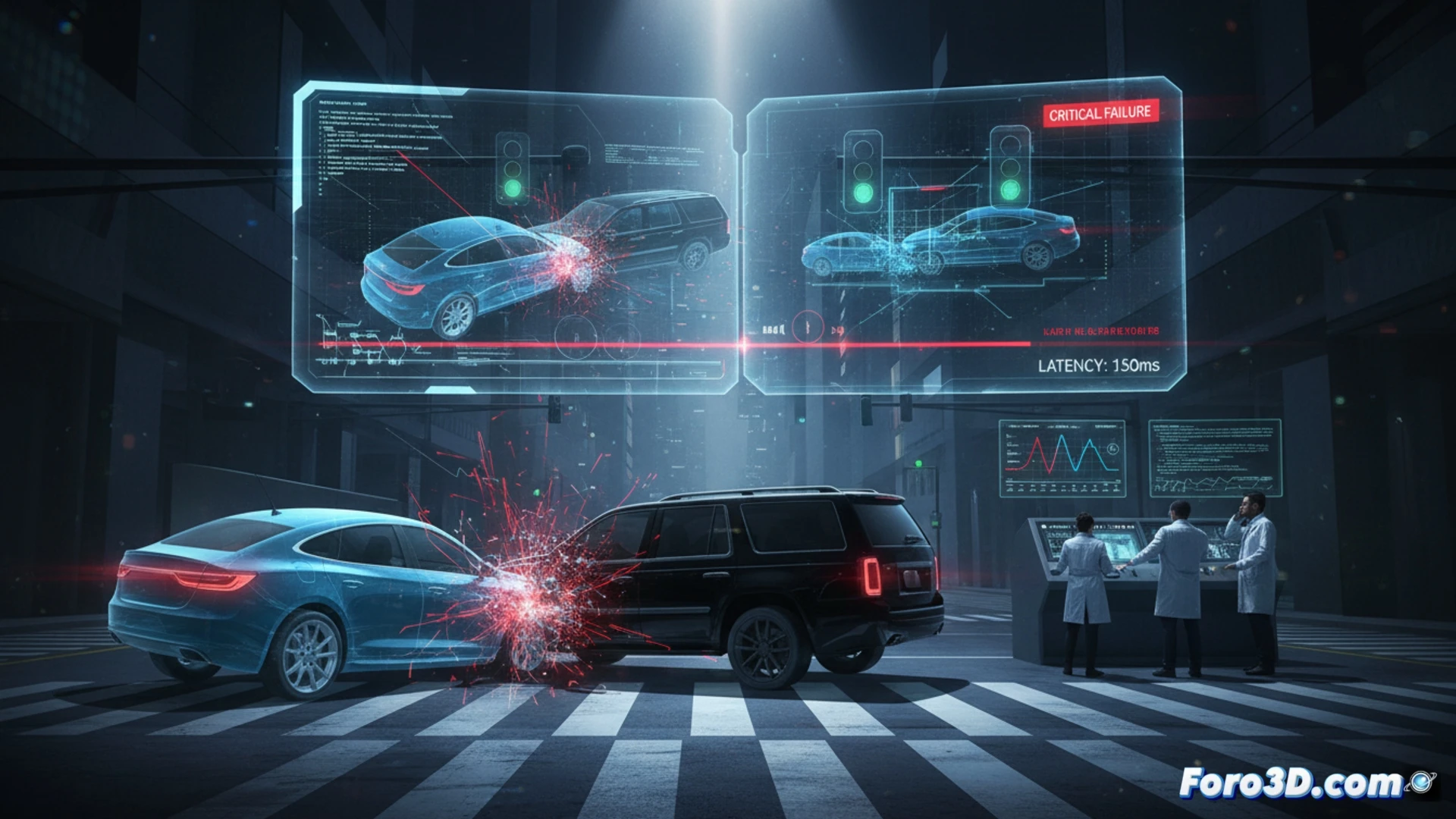
在智能交叉口发生了一起事故,当时V2X交通灯显示通行信号,但自动驾驶车辆未能及时反应。为了查明故障原因,工程师构建了该交叉口的精确数字孪生模型。该模型利用街道激光雷达数据复制了真实环境,使工程师能够隔离关键变量:传感器检测与车辆响应之间的延迟。目标是找出将绿灯变为致命陷阱的时间差。
激光雷达点云导入与Unity中的延迟模拟 🚦
过程始于通过街道固定激光雷达传感器捕捉道路几何数据。原始数据在CloudCompare中处理,以清除噪声并将点云与交叉口CAD模型对齐。优化后的网格导入Unity,在此创建数字孪生模型。为重现事故,编写了模拟V2X网络延迟的脚本。在Unreal Engine 5中,精确序列被可视化:激光雷达传感器检测到行人并发送信号,但自动驾驶车辆接收制动指令时延迟了120毫秒,足以引发碰撞。MATLAB分析了数字孪生模型的时间信号,比较激光雷达时间戳与车辆ECU时间戳,确认了关键时间差。
更安全智能基础设施的启示 🛠️
数字孪生模型证明,故障既非传感器也非车辆本身,而是V2X同步协议的问题。120毫秒的延迟虽小,但在高速环境下却是致命的。解决方案不仅是更快的硬件,而是在交通灯软件中实施安全时间缓冲,并通过数字孪生模型模拟验证。此案例强调,智慧城市的可靠性取决于其虚拟孪生模型与物理系统之间的完美同步。
作为工程师,V2X交通灯与数字孪生云之间具体多少毫秒的延迟导致了自动驾驶车辆反应的致命时间差?
(附注:我的数字孪生模型此刻正在开会,而我在这里建模。所以严格来说,我同时身处两地。)