在一次机器人手术中,显微手术针断裂引发了一个关键的技术难题:是材料疲劳失效,还是机器人施加的压力过大? 回收的碎片通过3D电子显微镜(ZEISS ZEN)和微米级有限元仿真(Abaqus)进行法医分析。本文详细解析了确定结构崩溃根本原因的工作流程。
法医工作流程:从3D显微图像到疲劳仿真 🔬
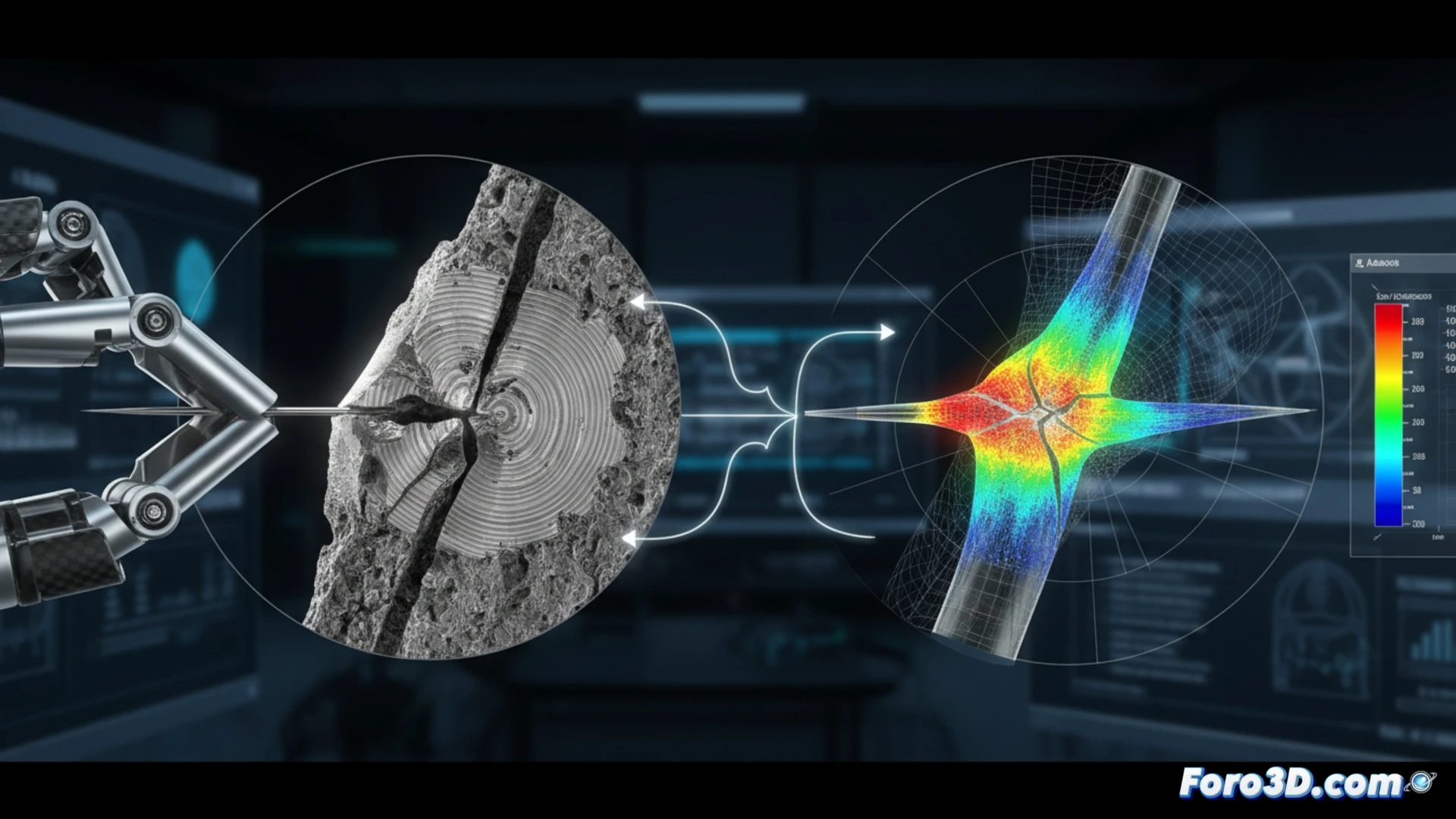
该过程始于使用ZEISS ZEN捕捉碎片表面形貌,生成高分辨率3D模型,揭示裂纹扩展痕迹和疲劳条纹。该模型导出至Materialise Mimics,以分割真实几何形状并修正伪影。随后,将其导入Abaqus进行微米级有限元分析,模拟机器人缝合中典型的循环载荷。分析比较了两种场景:重复循环累积的疲劳,与超过316L不锈钢弹性极限的瞬时过载。针尖处的冯·米塞斯应力分布决定了失效是否与接触骨组织的区域一致。
触觉反馈的困境:压力可控还是软件错误? 🤖
仿真表明,瞬时过载会产生边缘清晰的脆性断裂模式,而疲劳则导致渐进条纹和局部塑性变形。如果Abaqus模型确认最大应力仅在持续压力条件下超过材料阈值,则原因指向触觉反馈软件故障。该分析不仅为材料正名,还迫使重新校准机器人的阻力算法,以避免未来事故。
在一次机器人手术中断裂的手术针的法医有限元仿真中,如何区分由未检测到的微振动引起的循环疲劳失效,与由机器人执行器刚度产生的瞬时过载失效?
(附注:材料疲劳就像你模拟10小时后的状态。)