最近一次远程手术中手术机器人的故障,给自动化行业敲响了警钟。在这起事件中,手术刀执行了致命的异常运动,其根源在于机械臂。通过光学计量学进行的法医分析揭示,原因并非软件错误,而是由控制信号延迟引起的伺服电机和齿轮上的不对称微磨损。
精密计量学:扫描与疲劳分析 🔬
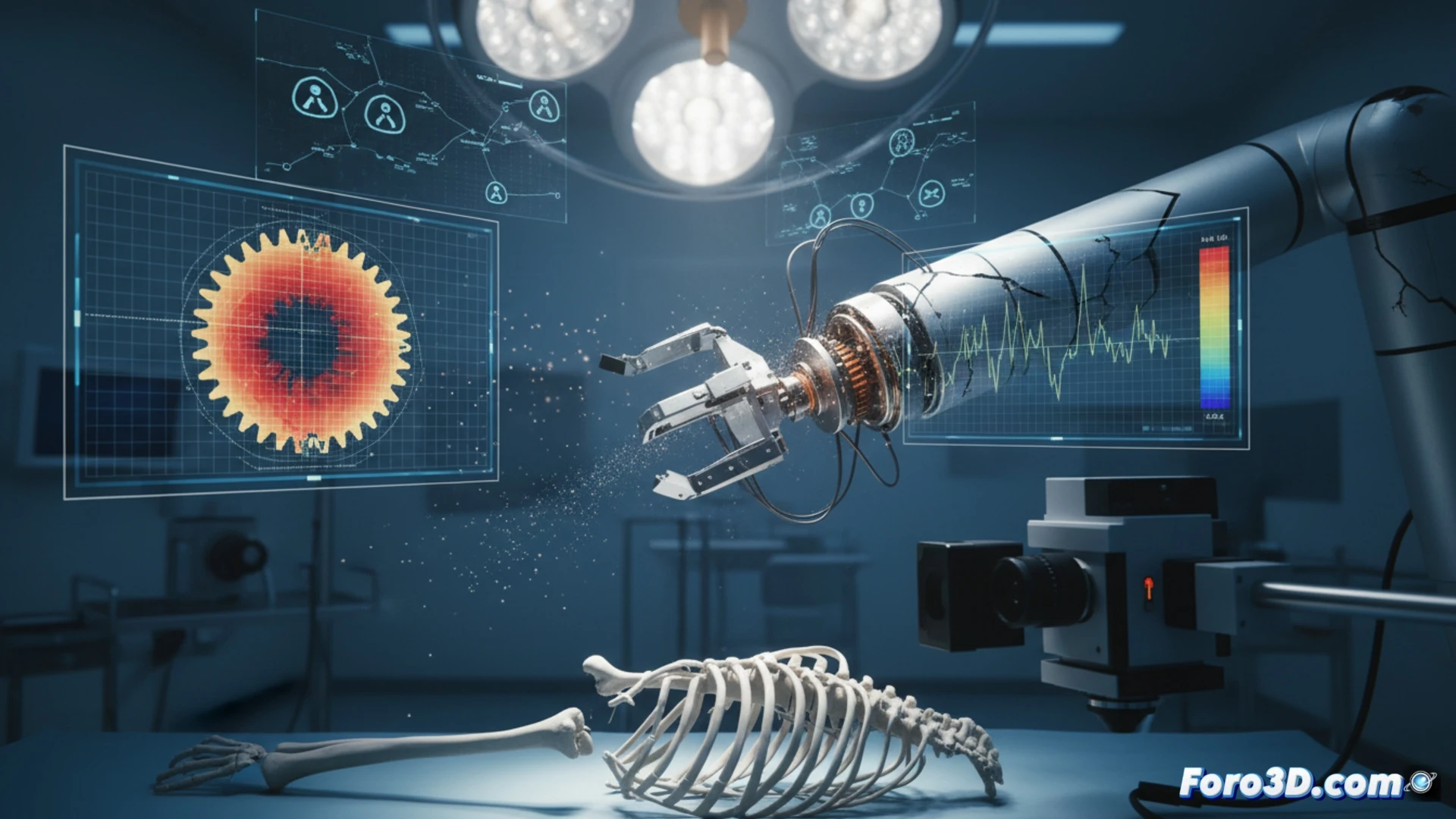
为了确定根本原因,使用了GOM ATOS Q扫描仪来捕捉机器人伺服电机和齿轮的几何形状。计量软件检测到接触表面仅有几微米的偏差,这是一种肉眼无法看到的不对称磨损。这种磨损模式与手术过程中在MATLAB中记录的持续微振动相关联。控制信号的延迟,尽管对外科医生来说难以察觉,却导致伺服电机振荡并过度修正,从而在合金齿轮齿上产生循环疲劳。SolidWorks中的模型证实,累积应力超过了材料的疲劳极限,导致了毫米级精度的丧失。
数字孪生与预测控制的教训 ⚙️
这个案例表明,手术机器人不仅依赖于软件的精度,还依赖于微米级的机械完整性。提出的解决方案是在Blender和SolidWorks中实现数字孪生,利用延迟数据实时模拟磨损。基于MATLAB振动频谱分析的预测性维护系统,可以在这些振荡导致严重磨损之前检测到它们。故障并非硬件问题,而是控制设计忽略了由网络引起的机械疲劳。
手术机器人行业如何减轻远程手术中信号延迟引起的执行器微磨损风险?
(附注:模拟机器人很有趣,直到它们决定不听从你的指令。)