机器人辅助肠切除术后出现渗漏,在一家顶级医院拉响了警报。最初的怀疑指向外科医生的失误,但通过显微CT进行的法医分析揭示了一个更复杂的真相:钛钉的变形不足。这一发现将调查方向转向了机器人的软件及其根据组织厚度计算适当压缩力的能力。
显微CT重建与Abaqus有限元模拟 🧬
法医团队通过显微CT对取出的钉进行了数字化处理,在Materialise Mimics中生成了高分辨率3D模型。将变形钉的实际几何形状与Abaqus中的理想模拟进行比较,发现了一个关键差异。机器人软件施加的压缩力相当于1.5毫米厚组织所需的力,而实际肠壁厚度为2.8毫米。这种低估导致钉未能达到封闭组织所需的闭合高度,留下了微通道,从而发生了渗漏。
机器人校准:组织厚度是不可妥协的变量 🤖
该案例表明,如果算法未能正确整合患者的生物力学特性,机器人的机械精度将毫无用处。教训很明确:机器人手术系统必须利用传感器或术前断层扫描数据,实时校准其压缩参数。忽视组织厚度的可变性,会将高科技工具变成患者可避免的风险。
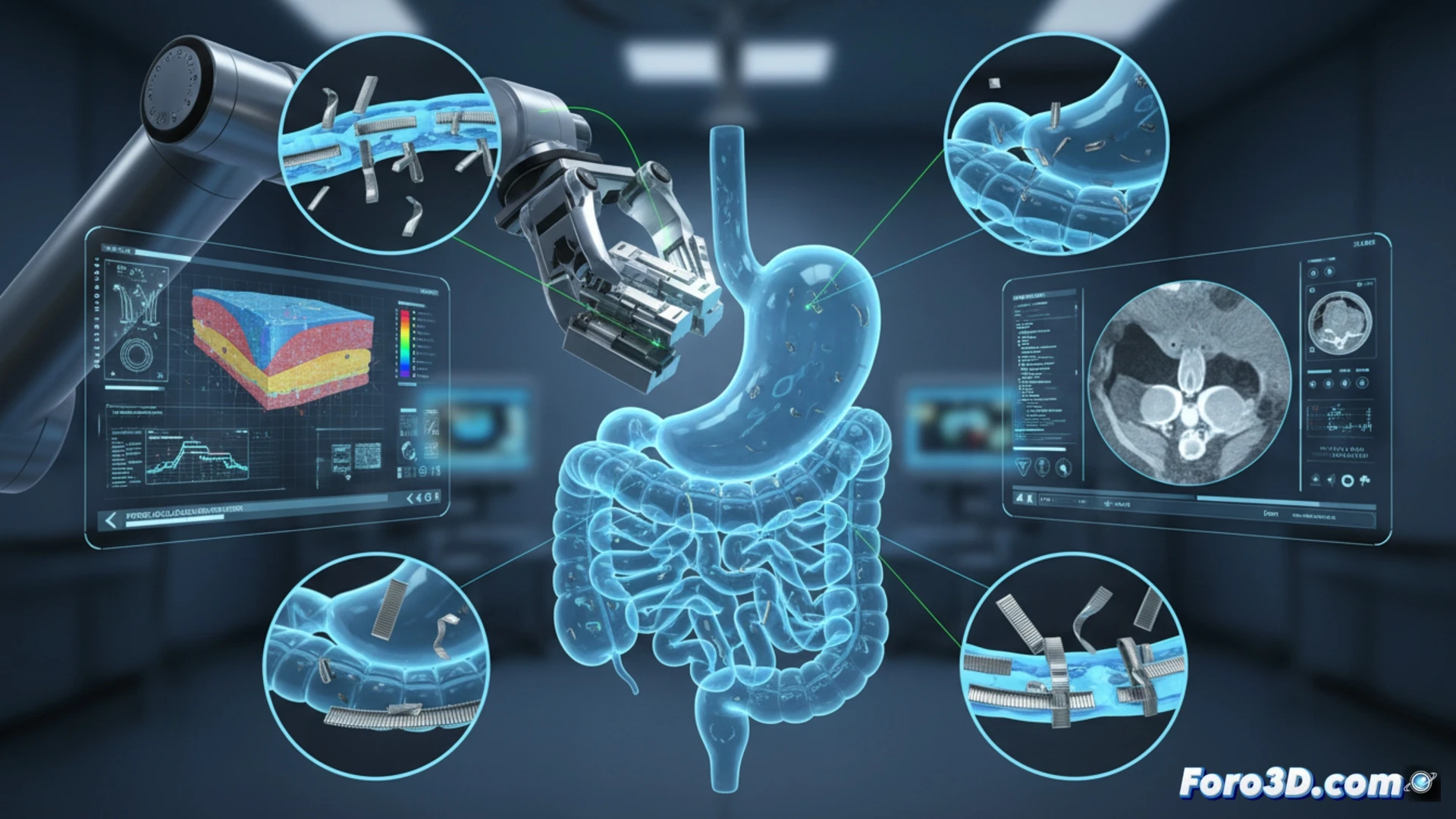
如何利用失败钉的形态和变形的3D分析来预测和预防机器人胃肠手术中的吻合口渗漏。
(附注:如果你3D打印一颗心脏,确保它能跳动……或者至少不会引起版权问题。)