最近一起手术机器人手臂磨损事件,重新引发了关于高精度环境下材料疲劳问题的讨论。与工业机器人不同——工业机器人故障可能导致生产线停工——在辅助手术中,磨损会直接危及患者安全。本文从技术角度分析了机械劣化的原因、使用数字孪生模拟循环应力的方法,以及基于3D模型的预测性维护策略。
通过数字孪生模拟疲劳关键点 🔧
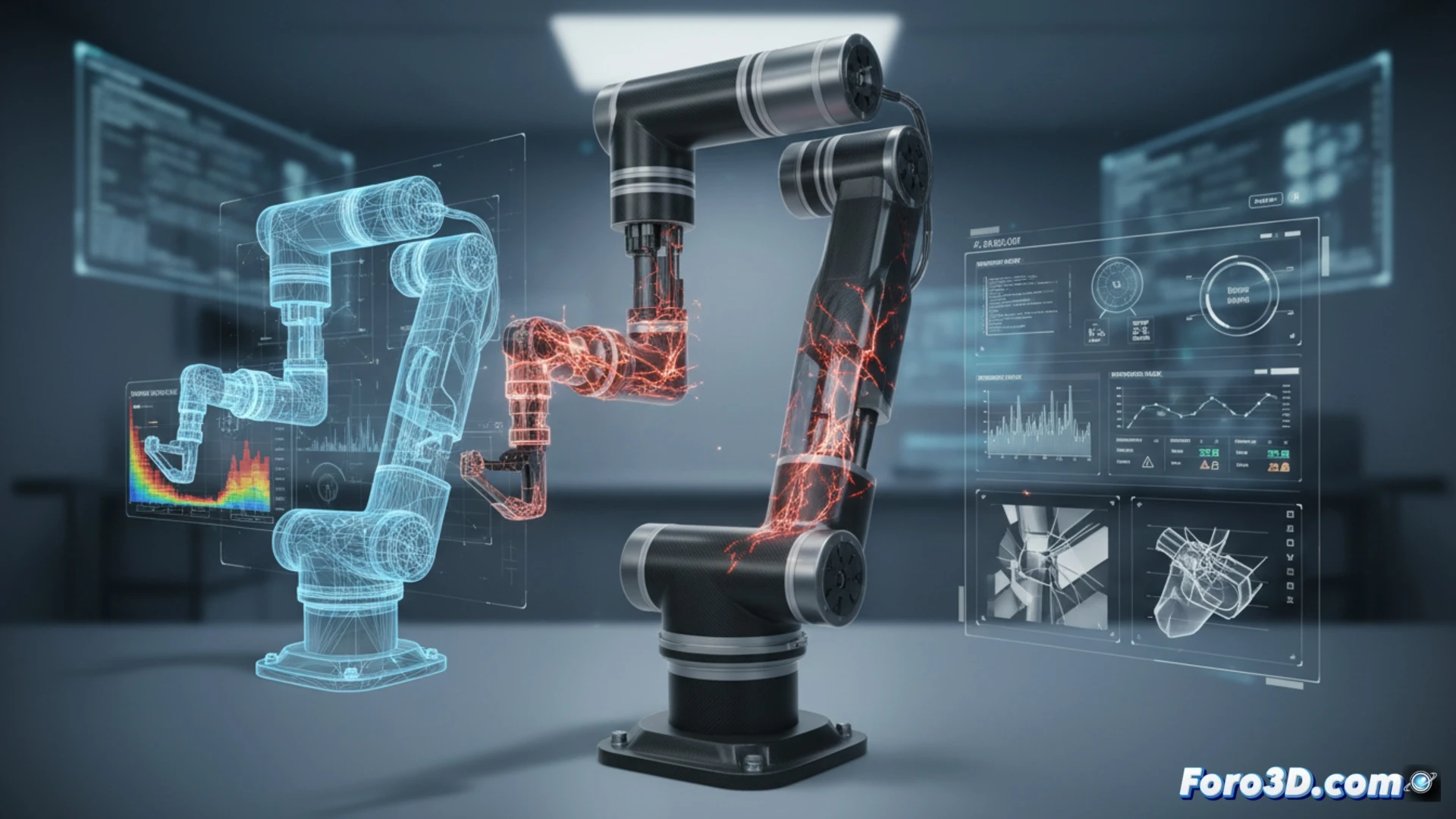
手术机器人手臂的磨损通常集中在球窝关节和谐波减速器上,重复的扭转力矩会在这些部位产生微裂纹。通过集成在数字孪生中的有限元模拟,工程师可以实时可视化应力分布。例如,达芬奇手臂的3D模型显示,其肘部承受的载荷比最初设计估计高出40%。这项技术与振动传感器相结合,能够提前数周预测故障,在实际手术前调整润滑周期或更换关键部件。
安全影响与被动维护的困境 ⚠️
此次事件的主要教训是,医疗机器人不能采取被动应对的方式。每一个未被检测到的微磨损,都可能在缝合过程中导致毫米级的偏差。使用3D模拟不仅能优化维护成本,还能重新定义认证标准。要求每台手术机器人手臂配备一个包含疲劳数据的数字孪生,应成为标准而非选项。预测故障的技术已经存在;挑战在于在磨损变成可避免的风险之前将其落实。
考虑到最近的手术机器人手臂磨损事件,可以实施哪些预测性模拟方法或实时监测传感器,以便在关节机械疲劳危及患者安全之前提前预警?
(附注:模拟机器人很有趣,直到它们决定不听从你的指令。)