预先3D模型消除安全盲点
规划有效的监控系统不再依赖于假设。专家现在使用3D扫描技术构建真实空间的数字孪生。这个模型成为设计、测试和优化每个组件的终极测试场,在物理安装之前消除人为错误。🎯
以毫米级精度创建数字基础
第一步是捕捉现实。一个激光扫描仪,如Leica RTC360,记录环境的完整几何形状,例如一个博物馆。该设备生成极其密集和精确的点云。技术人员随后在专业软件中处理这些数据,如Autodesk ReCap,生成一个坚实且即用的3D模型。这个虚拟复制品以精确度包含每一根柱子、展示柜和走廊。
初始扫描的关键优势:- 绝对精度:捕捉尺寸和障碍物无误差余地。
- 完整文档:获得站点状态的永久3D记录。
- 模拟基础:模型是测试整个系统的环境。
安全中的真正窃贼是假设随机放置摄像头有效。3D模拟让即兴发挥无话可说。
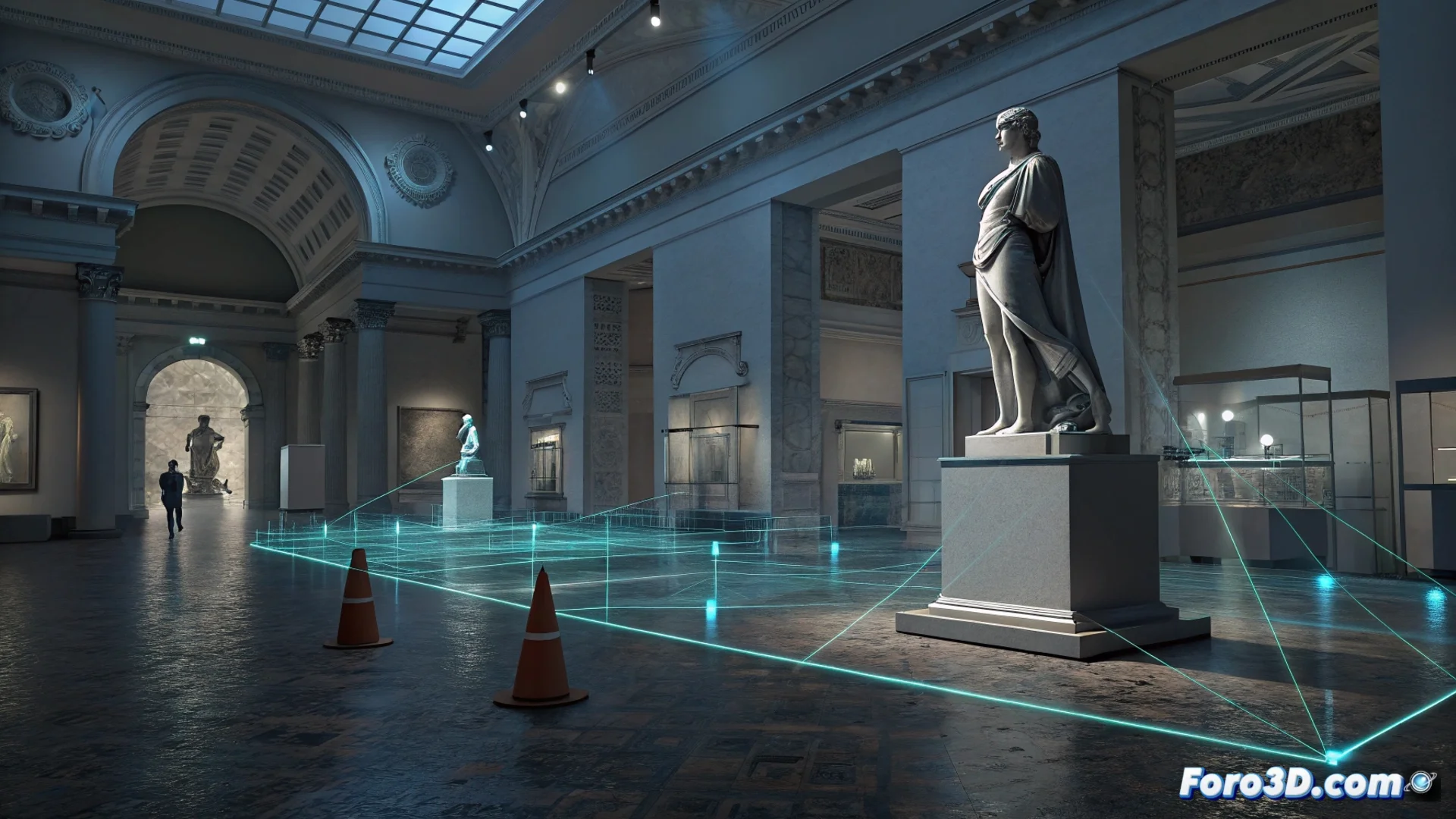
在3D引擎中模拟和分析覆盖范围
将3D模型加载到如Unreal Engine或Unity的引擎中,开始主动设计阶段。规划者将虚拟监控摄像头放置在提议的位置。配置真实技术参数:焦距、分辨率、倾斜角度和视野。软件渲染每台摄像头的视角,自动计算覆盖区域,以及关键的由环境物体产生的阴影和遮挡。这样揭示了人员可能未被检测到的走廊或角落:盲点。
模拟的参数:- 每台摄像头的视野(FOV)和有效范围。
- 建筑障碍和家具的影响。
- 环境照明与摄像头视野的交互。
优化设计并验证安装
识别盲点允许立即迭代设计。技术人员在模型中直接调整位置、更换镜头类型或添加额外设备。工具如JVSG IP Video System Design Tool帮助优化这个技术过程。最终目标是实现重叠覆盖,其中一台摄像头的视野覆盖另一台的盲区。只有当模拟验证完全无隙覆盖时,才批准安装物理系统的计划。此方法节省时间,减少返工成本,并确保系统从第一天起按设计运行。✅